
WATLOWCLS200 Communications Specification Includes CLS200, MLS300 and CAS200
Overview
This reference guide is designed to help applications software programmers interface with Watlow®
CLS200 and MLS300 controllers and CAS200 alarm scanners via serial communication.
The following chapters are included in this guide:
• Anafaze/AB Protocol—gives an overview and explanation of the Anafaze/Allen Bradley
communications protocol
• Modbus®-RTU Protocol—gives an overview and explanation of the Modbus®-RTU
communications protocol
• Data Table Summary—provides standard controller data table maps for the parameters (one for
each protocol)
• Parameters Description—describes each parameter
• Glossary—explanations of commonly used terms and acronyms
Chapter 1: Anafaze/AB
Protocol
This chapter explains the ANAFAZE/Allen Bradley protocol.
Anafaze/AB Protocol Basics
This protocol is used with a serial communications link (EIA/TIA-232 or EIA-TIA-485) configured as
follows:
• 2400 or 9600 baud
• 8 data bits
• One or 2 stop bits
• No parity
Protocol Syntax
The controllers use a half-duplex (master-slave) protocol to interface to high-level software. The host
software is considered the “master” and the controller is considered the “slave.” In other words, the
software can request information from the controller or download information to the controller. The
controller can only respond to communications transactions initiated by the host software. The controller
cannot initiate communications.
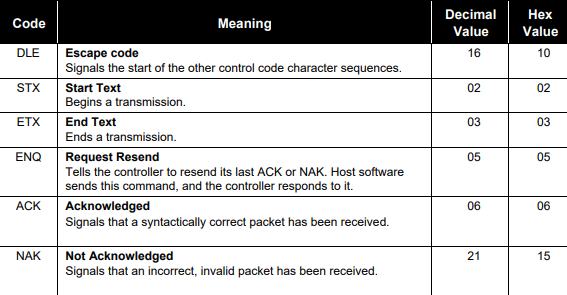
Control Codes
The controller and host software communicate by sending and receiving information in a “packet”
format. A packet consists of a sequence of bytes in a specific format; it can be as large as 256 bytes of
data. (For more information about packets, see the Packet Format section later in this chapter.)
The numbers in the packet are sent in binary format. However, our examples show bytes in hexadecimal
forma
Control code abbreviations in this manual
Transaction Sequence
Here are the four steps in a transaction between the host software and the controller. The following
example shows the transaction as an exchange of packets. The example also assumes that there are no
communication errors in the exchange.
1. The host software sends a packet that contains a read command or write command.
2. The controller sends a DLE ACK to the host software.
3. The host software receives a reply packet from the controller.
4. The host software sends a DLE ACK.
Transaction flow with no error handling

NOTE Due to the difference between the processing speeds of the controller and PC, it may be
necessary to delay the computer's acknowledgement (ACK) in order for the controller to receive it.
A delay of 200ms should suffice.
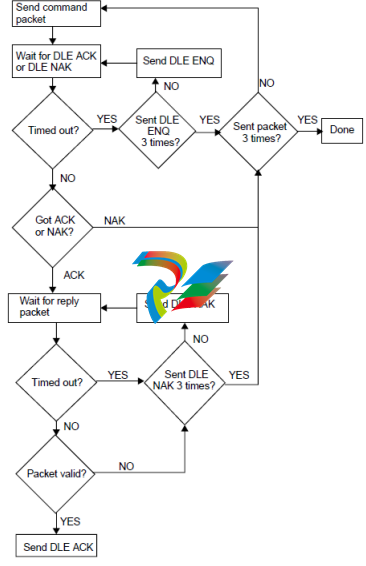
The flowchart below shows one way for the host software to handle error checking. If you are writing
simple software, you don't necessarily need to use error handling routines as complete as these
Transaction flow with error handling
Packet Format
Messages are transmitted in the form of packets. Command and reply packets specify the source and
destination addresses, whether to read or write, the block of data to read or write, etc.
A packet contains a sequence of binary bytes formatted this way:
Sending Control Codes
To send a control code, send a DLE before the control code to distinguish it from data.
Sending a DLE as Data
When you send a byte with 0x10, (a DLE), the controller and software interpret it as a command.
Therefore, to send a DLE as data, send another DLE immediately before it (DLE DLE).
Codes in a Packet
This section describes the sequence of bytes in a packet, in the order the host software or controller
sends them
DLE STX (byte) signals the beginning of a transmission. Every packet of information starts with the
control codes DLE STX.
DST (byte) the address of the destination device (usually a controller; the first CLS200 controller is at
0x08).
NOTE: When host software communicates with a CLS200 controller via the ANAFAZE or AB
protocol, it does not send the controller’s actual address. Since the protocol reserves device
addresses 0 to 7, the host software sends the value (controller address + 7), instead of the actual
device address.
SRC (byte) the device address of the packet’s source. The host software is usually designated address
0x00.
CMD (byte) indicates the command that the host software sends to the controller. The software sends a
read (0x01) or write (0x08). When the controller replies, it returns the read or write command with the
7th bit set—in other words, it sends 0x41 or 0x48.
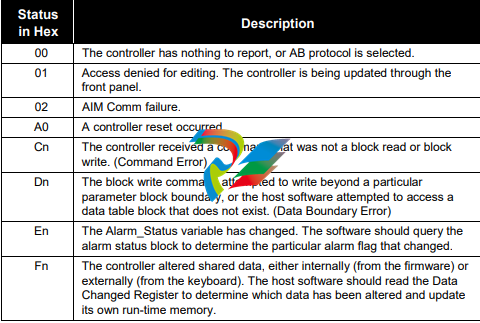
STS (byte) indicates the controller’s general status and error flags to the host software. The controller
ignores the status byte in the host software's command packet. The table below lists status byte values
and definitions.
An “n” in the status bytes below indicates that the associated nibble may contain additional information.
In most cases, the status byte is composed of two independent nibbles. Each nibble is independent so
that two codes can return at once. For example, status code F1 indicates that data has changed (Fn) and
the controller is being updated through the front panel (0x1).
TNSL least significant byte of the transaction number. This is the first half of a “message stamp.” The
controller sends back the TNSL and TNSH exactly as it received them, so host software can use the
TNSL and TNSH bytes to keep track of message packets.
TNSH most significant byte of the transaction number. This is the second half of the “message stamp.
ADDL the low byte of the beginning data table address of the block of data to read or write.
ADDH the high byte of the beginning data table address of the block of data to read or write.
DATA the new values to be set with a write command, or the requested data in a response to a read
command.
DLE ETX ends every packet of information. Signals the end of a transmission.
BCC or CRC one or two-byte error check at the end of the packet. There are two error check methods:
Block Check Character (BCC), which requires 1 byte, and Cyclic Redundancy Check (CRC), which
requires 2 bytes.
Error Checking
The default error check method, BCC is easier to implement than CRC, and is acceptable for most
applications.
Select one error check method and configure both software and controller for that method, or they will
be unable to communicate.
The error check methods work this way:
Block Check Character (BCC)
BCC checks the accuracy of each message packet transmission. It provides a medium level of security.
The BCC is the 2’s complement of the 8-bit sum (modulo-256 arithmetic sum) of the data bytes between
the DLE STX and the DLE ETX. (1’s complement +1)
• BCC does not detect transposed bytes in a packet.
• BCC cannot detect inserted or deleted 0 values in a packet.
• If you have sent 0x10 as data (by sending DLE 0x10) only one of the DLE data bytes is included in
the BCC’s sum (the DLE = 0x10 also).
For instance, the block read example shown in the examples section, adds 0x08 00 01 00 00 80 02 10.
Note that the 0x10 representing DLE has been left out of the calculation. The sum should come to 0x9B.
1001 1011 = 0x9B
0110 0100 = 1’s complement
______ +1 = 2’s complement
0110 0101 = 0x65
Cyclic Redundancy Check (CRC)
CRC is a more secure error check method than BCC. It provides a very high level of data security. It can
detect:
• All single-bit and double-bit errors.
• All errors of odd numbers of bits.
• All burst errors of 16 bits or less.
• 99.997% of 17-bit error bursts.
• 99.998% of 18-bit and larger error bursts.
The CRC is calculated using the value of the data bytes and the ETX byte. At the start of each message
packet, the transmitter must clear a 16-bit CRC register.
When a byte is transmitted, it is exclusive-ORed with the right 8 bits of the CRC register and the result
is transferred to the right 8 bits of the CRC register. The CRC register is then shifted right 8 times by
inserting 0’s on the left.
Each time a 1 is shifted out on the right, the CRC register is Exclusive-ORed with the constant value
0xA001. After the ETX value is transmitted, the CRC value is sent, least significant byte (LSB) first.
Structured English procedure from AB Manual
data_byte = all application layer data, ETX
CLEAR CRC_REGISTER
FOR each data_byte
GET data_byte
XOR (data_byte, right eight bits of CRC_REGISTER)
PLACE RESULT in right eight bits of CRC_REGISTER
DO 8 times
Shift bit right, shift in 0 at left
IF bit shifted =1
XOR (CONSTANT, CRC_REGISTER)
PLACE RESULT in CRC_REGISTER
END IF
END DO
END FOR
TRANSMIT CRC_REGISTER as 2-byte CRC field
Examples
The host software sends two kinds of commands: block reads and block writes. This section shows
examples of both commands.
Note: If you read data from a loop set to SKIP, the controller will send an empty packet for that loop.
This section does not show how to calculate the error check value included with every packet. For help
calculating the error check value, see the section on BCC or CRC.
Block Read
This example shows the block read command the host software sends, the controller’s responses, and the
software's acknowledgment.
Situation: Read process variables for loops 1 to 8.
• 8 process variables 2 bytes each = 16 bytes from data table address 0x0280.
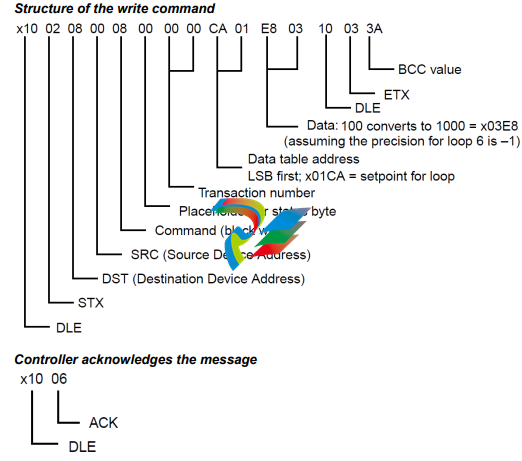
Block Write
This section describes the block write command.
This example shows the block write command the master sends, the controller's responses, and the
master's acknowledgment:
Situation: Write setpoint of 100 to loop 6.
• 1 setpoint 2 bytes per setpoint = 2 bytes to address 0x01CA (0x01C0 + xA, a 10-byte offset).
• Character values are represented in hexadecimal.
• The sender is device address 0.
• The destination is device address 8 (controller address 1).
• The software sends transaction number 00.
Message Data
Some messages contain data. What the data is and how much depends on the command used and the
purpose of the message.
Data for a Read Command
For a block read command, the data block consists of one byte that indicates the number of bytes to read
(up to 244 bytes of data). The controller sends back a packet with a data block that contains the
requested bytes.
Data for a Write Command
For a block write command, the block contains the bytes to write (up to 242 bytes of data). The
controller sends back a message packet without data.
Two-Byte Data Types
For two-byte data types, like process variable and setpoint, the controller or host software sends the data
in two-byte pairs with the least significant byte first.
Figuring Block Size
To read parameter values, you must know how many bytes to request. Parameter values are stored
contiguously such that the setpoints for all the loops are stored together and in loop number order. For
example, to read the deviation alarm deadband value for loops one to five, you would read five bytes
starting at 0x05A0. Some parameters, such as setpoint, require two bytes of memory to store. So, for
example, if you want to read the setpoint for four loops, you must read eight bytes.
Calculate total block size in bytes for most loop parameters this way (do not forget the pulse loop):
(Data Size) * (Number of Loops)
Some parameters have values for both heat and cool. Calculate block size for such a parameter this way:
2 * (Data Size) * (Number of Loops)
One exception is the units for each loop. Calculate the data size for the units this way:
3 * (Number of Loops)
Parameters that are not loop parameters (like system status, digital inputs, or digital outputs) have
specific data sizes. These data sizes are listed in the data table in the next section.
Anafaze/AB Data Table Summary
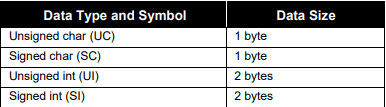
Each address holds one byte of data. Each parameter value requires one or two addresses to store
depending on the type of data. The tablebelow indicates the number of bytes for each data type. The
data type for each parameter is indicated in the tables on the following pages.
Because each loop is individually configurable, the number of instances of many parameters depends on
the number of loops in the controller. Therefore, the number of bytes for these parameters is listed in the
tables on the following pages in terms of the number of loops in the controller.
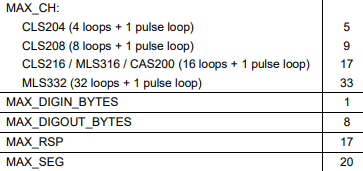
The storage requirements for some parameters depend on the number of digital inputs or digital outputs
in the controller (MAX_DIGIN_BYTES and MAX_DIGOUT_BYTES). The storage of ramp-soak
profile parameters depend on the number of profiles (MAX_RSP), the number of segments per profile
(MAX_SEG), the number of triggers per segment (MAX_TRIG) and the number of events per segment
(MAX_EVENT).
The table below shows the values for each of these factors. Use them to calculate the number of bytes
for each parameter.
Ordering of Heat and Cool Channel Parameters
For parameters that have both heat and cool settings the heat values are stored in the first registers and
the cool values are stored in the registers starting at the listed address plus MAX_CH.
Note: Data table parameters 46 to 60 and 100 are ramp-soak parameters. They are only used in
controllers with the ramp-soak option. Parameters 81 to 95 are enhanced features and only available in
controllers with the enhanced features option.
Ordering of Ramp-Soak Profile Parameters
Ramp-soak profile parameters are ordered first by profile, then by segment where applicable. So, for
example, the first eight bytes of the Ready Events parameter are the ready segment event states for the
first profile (profile A) and the next eight bytes are for profile B and so on. In the case of the segment
triggers, the first byte contains the first trigger setting for the first segment of profile A, the second byte
contains the settings for the second trigger for the first segment of profile A, the third byte contains the
settings for the first trigger for the second segment of profile A and so on.
-
 HIRSCHMANN MSM20-M2M2M2M2SY9HH9E Ethernet media modul
HIRSCHMANN MSM20-M2M2M2M2SY9HH9E Ethernet media modul -
 HIRSCHMANN SPIDER-PL-20-05T1999999TWVHHHH Industrial Ethernet Rail Switch
HIRSCHMANN SPIDER-PL-20-05T1999999TWVHHHH Industrial Ethernet Rail Switch -
 Hirschmann SPIDER-PL-20-07T1M2M299TWVHHHH Industrial ETHERNET Rail Switch
Hirschmann SPIDER-PL-20-07T1M2M299TWVHHHH Industrial ETHERNET Rail Switch -
.png) Hirschmann (Belden) RS20-1600M2M2SDAEHC09.1.00 DIN-rail managed industrial Fast Ethernet switch
Hirschmann (Belden) RS20-1600M2M2SDAEHC09.1.00 DIN-rail managed industrial Fast Ethernet switch -
 Hirschmann (Belden) RS30-1602O6O6TDAPHC09.1.00 DIN-rail managed industrial Ethernet switch
Hirschmann (Belden) RS30-1602O6O6TDAPHC09.1.00 DIN-rail managed industrial Ethernet switch -
 Hirschmann (Belden) RS30-2402O6T1SDAPHH09.0.13 DIN-rail industrial Ethernet switch
Hirschmann (Belden) RS30-2402O6T1SDAPHH09.0.13 DIN-rail industrial Ethernet switch -
Hirschmann (Belden) SPIDER-PL-20-04T1S29999TY9HHHH Ethernet DIN-rail switch
-
 HIRSCHMANN RS20-1600T1T1SDAUHX Switch
HIRSCHMANN RS20-1600T1T1SDAUHX Switch -
 HIRSCHMANN BRS42-0012OOOO-SPCZ99HHSES industrial switch
HIRSCHMANN BRS42-0012OOOO-SPCZ99HHSES industrial switch -
 Hirschmann RS20-0800S2S2TDHPHH09.0.14 Fast Ethernet DIN rail switch.
Hirschmann RS20-0800S2S2TDHPHH09.0.14 Fast Ethernet DIN rail switch. -
 HIRSCHMANN MM20-Z6Z6M2M2SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-Z6Z6M2M2SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-Z6Z6T1T1SAHH hot-swappable hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-Z6Z6T1T1SAHH hot-swappable hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-P9P9T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-P9P9T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M4T1T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-M4T1T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M4M4T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-M4M4T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M2M2M2M2SZHH Ethernet media module
HIRSCHMANN MM20-M2M2M2M2SZHH Ethernet media module -
HIRSCHMANN MM20-M2M2M2M2SAHH Ethernet media module
-
 HIRSCHMANN MM20-T1T1T1T1EBH 4-port Fast Ethernet Copper Cable Media Module
HIRSCHMANN MM20-T1T1T1T1EBH 4-port Fast Ethernet Copper Cable Media Module -
HIRSCHMANN MM20-T1T1T1T1SAHH 4-port Fast Ethernet Copper Cable Media Module
-
HIRSCHMANN MM20-T1T1T1T1SAHH 4-port Fast Ethernet Copper Cable Media Module
-
 HIRSCHMANN MM20-Z6Z6EBH Hot-swappable fast Ethernet media module
HIRSCHMANN MM20-Z6Z6EBH Hot-swappable fast Ethernet media module -
 HIRSCHMANN MM20-Z6Z6SAHH Ethernet media module
HIRSCHMANN MM20-Z6Z6SAHH Ethernet media module -
HIRSCHMANN MM20-Z6Z6Z6Z6EBH Industrial Media Module
-
 MSM40-T1T1T1TZ9HH9E99.9.99 HIRSCHMANN Switch
MSM40-T1T1T1TZ9HH9E99.9.99 HIRSCHMANN Switch -
 HIRSCHMANN MS20-0800SAAEHC / MS20-0800SAAEHC0 8-port modular Layer 2 management Ethernet switch
HIRSCHMANN MS20-0800SAAEHC / MS20-0800SAAEHC0 8-port modular Layer 2 management Ethernet switch -
 Hirschmann RSPM20-4T14T1SZ9HHS9 Switch RSPM20-4T14T1SZ9HHS9
Hirschmann RSPM20-4T14T1SZ9HHS9 Switch RSPM20-4T14T1SZ9HHS9 -
 HIRSCHMANN RS20-1600M2M2SDAEHH09.1. RS20/30/40 Managed Switch configurator
HIRSCHMANN RS20-1600M2M2SDAEHH09.1. RS20/30/40 Managed Switch configurator -
HIRSCHMANN RS20-1600M2M2SDAEHX09.0.00 Ethernet switch
-
 HIRSCHMANN BELDEN SPIDER-PL-20-07T1M2M299TY9HHHH / SPIDERPL2007T1M2M299TY9HHHH
HIRSCHMANN BELDEN SPIDER-PL-20-07T1M2M299TY9HHHH / SPIDERPL2007T1M2M299TY9HHHH -
HIRSCHMANN MM3-1FXS2/3TX1 Switching Board Module
-
 HIRSCHMANN RSPE30-24044O7T99-ECCP999HHSE2A08.1.00 Industrial-grade fanless management-type Ethernet switch
HIRSCHMANN RSPE30-24044O7T99-ECCP999HHSE2A08.1.00 Industrial-grade fanless management-type Ethernet switch -
 HIRSCHMANN RS30-1602OOZZSDAEHC09.1.00 DIN-rail-mounted managed Layer 2 Ethernet switch
HIRSCHMANN RS30-1602OOZZSDAEHC09.1.00 DIN-rail-mounted managed Layer 2 Ethernet switch -
 HIRSCHMANN MACH104-20TX-F Managed 24-port Full Gigabit 19" Switch
HIRSCHMANN MACH104-20TX-F Managed 24-port Full Gigabit 19" Switch -
 HIRSCHMANN Switch RS20-0800M4M4SDAE
HIRSCHMANN Switch RS20-0800M4M4SDAE -
Hirschmann RS30-1602O6O6SDAEHH09.1. Management-type Ethernet switch
-
 Hirschmann RS30-1602OOZZSDAEHC09.0.10 Open rack-style Ethernet switch
Hirschmann RS30-1602OOZZSDAEHC09.0.10 Open rack-style Ethernet switch -
 HIRSCHMANN RSPE30-24044O7T99-SCCV999HHSI2SXX.X.XX High-Availability Seamless Redundancy
HIRSCHMANN RSPE30-24044O7T99-SCCV999HHSI2SXX.X.XX High-Availability Seamless Redundancy -
HIRSCHMANN RSPE30-24044O7T99-SCCZ999HHSE2A DIN-rail Ethernet switch
-
HIRSCHMANN MM2-4TX1-EEC switch
-
HIRSCHMANN MSM40-T1T1T1T1TZ9HH9E99.9.99 Module
-
 HIRSCHMANN RS20 Rail Switch RS20-0400S4T1SDAEHC07.1.01
HIRSCHMANN RS20 Rail Switch RS20-0400S4T1SDAEHC07.1.01 -
 HIRSCHMANN M4-FAST8-SFP Fast Ethernet media module
HIRSCHMANN M4-FAST8-SFP Fast Ethernet media module -
 HIRSCHMANN RS20-0400M2T1SDAP Managed Fast-Ethernet-Switch
HIRSCHMANN RS20-0400M2T1SDAP Managed Fast-Ethernet-Switch -
 HIRSCHMANN BELDEN SPIDER II 8TX/1FX EEC Industrial Ethernet Rail Switch
HIRSCHMANN BELDEN SPIDER II 8TX/1FX EEC Industrial Ethernet Rail Switch -
HIRSCHMANN MM3-2FXS2/2TX1
-
 HIRSCHMANN RS2-4TX/1FX EEC Industrial Ethernet Rail Switch
HIRSCHMANN RS2-4TX/1FX EEC Industrial Ethernet Rail Switch -
 RS30-0802O6O6SDAEHC09.0.10 HIRSCHMANN Switch
RS30-0802O6O6SDAEHC09.0.10 HIRSCHMANN Switch -
 HIRSCHMANN m4-8TP-RJ45 Ethernet Media Module
HIRSCHMANN m4-8TP-RJ45 Ethernet Media Module -
 HIRSCHMANN MSP30-24040SCZ9URHHE3A switch
HIRSCHMANN MSP30-24040SCZ9URHHE3A switch -
 Hirschmann rack MS30-1602SAAPHC
Hirschmann rack MS30-1602SAAPHC -
 HIRSCHMANN RS2-FX/FX Industrial Switch Module
HIRSCHMANN RS2-FX/FX Industrial Switch Module -
Rs1txfx - Hirschmann - Rs1-Tx/Fx Rail Switch
-
RS20-0800S2S2SDAEHC09.1.00 HIRSCHMANN Commutator
-
 Hirschmann EAGLE20 TX/TX Industrial Security Router
Hirschmann EAGLE20 TX/TX Industrial Security Router -
 Hirschmann SPIDER-SL-20-04T1S29999SY9HHHH Industrial Switch
Hirschmann SPIDER-SL-20-04T1S29999SY9HHHH Industrial Switch -
 HIRSCHMANN MAR1040-4C4C4C4C9999SMMHRHHXX.X. Gigabit Ethernet Switch configurator
HIRSCHMANN MAR1040-4C4C4C4C9999SMMHRHHXX.X. Gigabit Ethernet Switch configurator -
 Hirschmann MAR1040 Industrial Switch
Hirschmann MAR1040 Industrial Switch -
 HIRSCHMANN BELDEN RS30-1602O6O6SDAE
HIRSCHMANN BELDEN RS30-1602O6O6SDAE -
Hirschmann RS20-1600M2M2SDAUHC Ethernet DIN rail switch
-
 HIRSCHMANN OCTOPUS 24M industrial switch
HIRSCHMANN OCTOPUS 24M industrial switch -
 HIRSCHMANN RS20-1600T1T1SDAE Management-type Ethernet switch
HIRSCHMANN RS20-1600T1T1SDAE Management-type Ethernet switch -
 HIRSCHMANN RS20-1600T1T1SDAUHH industrial switch
HIRSCHMANN RS20-1600T1T1SDAUHH industrial switch -
HIRSCHMANN RS20-0800M2M2SDAPHC09.0.04 switch
-
 Hirschmann MR 8-03 24V DC Industrial Modular Bridge/Router
Hirschmann MR 8-03 24V DC Industrial Modular Bridge/Router -
 HIRSCHMANN RS20-0400M2T1SDAPHC08.0.01 Managed Switch
HIRSCHMANN RS20-0400M2T1SDAPHC08.0.01 Managed Switch -
 MACH1130 Hirschmann Industrial Switch
MACH1130 Hirschmann Industrial Switch -
 HIRSCHMANN 943824-002 SPIDER 5TX Industrial Ethernet Switch
HIRSCHMANN 943824-002 SPIDER 5TX Industrial Ethernet Switch -
 HIRSCHMANN RS30-0802O6O6SDAEHC09.1.00 Managed Industrial Switch
HIRSCHMANN RS30-0802O6O6SDAEHC09.1.00 Managed Industrial Switch -
 HIRSCHMANN RS20-0400M2M2TDAEHC04.0.01 Industrial Switch
HIRSCHMANN RS20-0400M2M2TDAEHC04.0.01 Industrial Switch -
 HIRSCHMANN BRS20-0600Z6Z6-STCZ99HHSES Industrial Switch
HIRSCHMANN BRS20-0600Z6Z6-STCZ99HHSES Industrial Switch -
 HIRSCHMANN MACH104-20TX-FR-L3P Industrial Ethernet Switch
HIRSCHMANN MACH104-20TX-FR-L3P Industrial Ethernet Switch -
 HIRSCHMANN RS40-0009CCCCEDBPHH06.0.01 Industrial Switch
HIRSCHMANN RS40-0009CCCCEDBPHH06.0.01 Industrial Switch -
 HIRSCHMANN RS2-3TX/2FX EEC Industrial Ethernet Switch
HIRSCHMANN RS2-3TX/2FX EEC Industrial Ethernet Switch -
 Hirschmann MACH 1020/1030 Fast/Gigabit Rack Mount Switches
Hirschmann MACH 1020/1030 Fast/Gigabit Rack Mount Switches -
HIRSCHMANN RS20-0800M2M2SDAPHC09.0.14 Industrial Switch
-
 HIRSCHMANN RS20-1600T1T1SDAEHC09.0.04 Industrial Switch
HIRSCHMANN RS20-1600T1T1SDAEHC09.0.04 Industrial Switch -
 HIRSCHMANN RSB20-0800T1T1EAABHH Industrial Switch
HIRSCHMANN RSB20-0800T1T1EAABHH Industrial Switch -
 HIRSCHMANN MACH4002-48+4G-L3E Industrial Backbone Switch
HIRSCHMANN MACH4002-48+4G-L3E Industrial Backbone Switch -
 HIRSCHMANN RS20-0400S2T1SDAE Industrial Managed Switch
HIRSCHMANN RS20-0400S2T1SDAE Industrial Managed Switch -
HIRSCHMANN RS20-0800S2T1SDAUHC Industrial Switch
-
 HIRSCHMANN RS20-2400S4S4SDAEHC09.0.14 industrial switch
HIRSCHMANN RS20-2400S4S4SDAEHC09.0.14 industrial switch -
 HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch
HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch -
HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch
-
 HIRSCHMANN RS40-0009CCCCSDAEHH09.0.14 switch
HIRSCHMANN RS40-0009CCCCSDAEHH09.0.14 switch -
 Hirschmann RS20-1600T1T1SDAUHC Management-type Ethernet Switch
Hirschmann RS20-1600T1T1SDAUHC Management-type Ethernet Switch -
 Hirschmann M1-8SFP Switche
Hirschmann M1-8SFP Switche -
Hirschmann Industrial Ethernet Ruggedized Switch MACH1000 Family
-
 Basler Electric, Solid State Protective Relay, BE1-60
Basler Electric, Solid State Protective Relay, BE1-60 -
BASLER ELECTRIC SR4A-2B15B3A Static Voltage Regulator
-
.png) BASLER ELECTRIC EXCITER DIODE MONITOR EDM-200
BASLER ELECTRIC EXCITER DIODE MONITOR EDM-200 -
.png) BASLER ELECTRIC DECS125-15-B2C5 DIGITAL EXCITATION CONTROL SYSTEM V 2.0.9
BASLER ELECTRIC DECS125-15-B2C5 DIGITAL EXCITATION CONTROL SYSTEM V 2.0.9 -
 BASLER ELECTRIC BE1-851 OVERCURRENT PROTECTION RELAY MECHANISM
BASLER ELECTRIC BE1-851 OVERCURRENT PROTECTION RELAY MECHANISM -
 Basler Electric BE1-51A / BE151A
Basler Electric BE1-51A / BE151A -
 Basler Electric BE1-40Q Loss of Excitation Relay
Basler Electric BE1-40Q Loss of Excitation Relay -
 Basler Electric BE1-87G Variable Percentage Differential Relay
Basler Electric BE1-87G Variable Percentage Differential Relay -
 Basler Electric BE1-11 Protection System I5A3M2P2N0EA00
Basler Electric BE1-11 Protection System I5A3M2P2N0EA00 -
 BASLER ELECTRIC DECS-200-1C Digital Excitation Control System
BASLER ELECTRIC DECS-200-1C Digital Excitation Control System -
 Basler Electric / Kohler BE1-11g Generator Protection Relay G5A3M2J2N0E000
Basler Electric / Kohler BE1-11g Generator Protection Relay G5A3M2J2N0E000 -
BASLER ELECTRIC DECS125-15 DIGITAL EXCITATION CONTROL SYSTEM
-
 BASLER ELECTRIC BE1-951 OverCurrent Protecton System
BASLER ELECTRIC BE1-951 OverCurrent Protecton System -
Basler Electric DECS-200-1L Digital Excitation Control System
-
 Basler Electric DGC-2020HD-5NS1DNSBA Digital Genset Controller -
Basler Electric DGC-2020HD-5NS1DNSBA Digital Genset Controller - -
 BASLER ELECTRIC BE1-81T1EE1WA0N1F / BE181T1EE1WA0N1F
BASLER ELECTRIC BE1-81T1EE1WA0N1F / BE181T1EE1WA0N1F -
 BASLER ELECTRIC BE1-25M1EA6PN5R1F / BE125M1EA6PN5R1F
BASLER ELECTRIC BE1-25M1EA6PN5R1F / BE125M1EA6PN5R1F -
 BASLER ELECTRIC DECS-250-LN1SN1N DIGITAL EXCITATION CONTROL SYSTEM
BASLER ELECTRIC DECS-250-LN1SN1N DIGITAL EXCITATION CONTROL SYSTEM -
Basler Electric DECS-250-CN2CN 1N Digital Excitation Control System Unit
-
 BASLER ELECTRIC DECS-300-C0N0 DIGITAL EXCITATION CONTROL SYSTEM
BASLER ELECTRIC DECS-300-C0N0 DIGITAL EXCITATION CONTROL SYSTEM -
 BASLER ELECTRIC BE1-87T-A1E-A1J-D0S1F / BE187TA1EA1JD0S1F
BASLER ELECTRIC BE1-87T-A1E-A1J-D0S1F / BE187TA1EA1JD0S1F -
BASLER ELECTRIC BE1-11-G6D1M0J2P0E000 Protection System
-
 BASLER ELECTRIC BE1-GPS100-E4N1H1N GENERATOR PROTECTION SYSTEM
BASLER ELECTRIC BE1-GPS100-E4N1H1N GENERATOR PROTECTION SYSTEM -
 Jaquet Relay card (Auxiliary module) FTV 3090 377Z-03985
Jaquet Relay card (Auxiliary module) FTV 3090 377Z-03985 -
 Jaquet Trip Chain Control card FTBU 3034 377Z-05030
Jaquet Trip Chain Control card FTBU 3034 377Z-05030 -
 Jaquet with input card -E04 FTFU 3024 -E04 377Z-05855
Jaquet with input card -E04 FTFU 3024 -E04 377Z-05855 -
 Jaquet with input card -E03 FTFU 3024- E03 377Z-03983
Jaquet with input card -E03 FTFU 3024- E03 377Z-03983 -
 Jaquet FTFU 3024- E02 377Z-03982 with input card -E02
Jaquet FTFU 3024- E02 377Z-03982 with input card -E02 -
 Jaquet FTFU 3024-E01 377Z-03981 with input card -E01
Jaquet FTFU 3024-E01 377Z-03981 with input card -E01 -
 Hirschmann RS20-2400T1T1SDAE Industrial Managed Ethernet Switch
Hirschmann RS20-2400T1T1SDAE Industrial Managed Ethernet Switch -
 Hirschmann BELDEN EAGLE30-04022O6TT999SCCV9HSE3F
Hirschmann BELDEN EAGLE30-04022O6TT999SCCV9HSE3F -
 Hirschmann MM3-2FXS2/2TX MICE Media Module
Hirschmann MM3-2FXS2/2TX MICE Media Module -
 Hirschmann RS20-1600M2M2SDAPHC08.0.05 Industrial Managed Switch
Hirschmann RS20-1600M2M2SDAPHC08.0.05 Industrial Managed Switch -
 Hirschmann OZD Profi 12M G12-1300 PRO Fieldbus Repeater
Hirschmann OZD Profi 12M G12-1300 PRO Fieldbus Repeater -
Hirschmann SPIDER 4TX/1FX-ST EEC Industrial Ethernet Switch
-
 Hirschmann MM2-2FXM3/2TX1 MICE Media Module
Hirschmann MM2-2FXM3/2TX1 MICE Media Module -
 Hirschmann RS20-2400M2M2SDAPHC09.0.14 Industrial Switch
Hirschmann RS20-2400M2M2SDAPHC09.0.14 Industrial Switch -
 Hirschmann RS20-0400M2M2SDAEHC07.1.05 OpenRail Switch
Hirschmann RS20-0400M2M2SDAEHC07.1.05 OpenRail Switch -
 Hirschmann OZD Profi 12M G12-EEC Fieldbus Repeater
Hirschmann OZD Profi 12M G12-EEC Fieldbus Repeater -
HIRSCHMANN MDA422-1/2-3.5c-23/46 sensor
-
Hirschmann RS30-2402T1T1SDAUHC Managed Industrial Switch


