
MOOGP-I Servoamplifier G122-829A001
Application Notes
1 Scope
These Application Notes are a guide to applying the
G122-829A001 P-I Servoamplifier. These Application Notes
can be used to:
Determine the closed loop structure for your application.
Select the G122-829A001 for your application. Refer also
to data sheet G122-829.
Use these Application Notes to determine your system
configuration.
Draw your wiring diagram.
Install and commission your system.
Aspects, such as hydraulic design, actuator selection, feedback
transducer selection, performance estimation, etc. are not
covered by these Application Notes. The G122-202 Application
Notes (part no C31015) cover some of these aspects. Moog
Application Engineers can provide more detailed assistance,
if required.
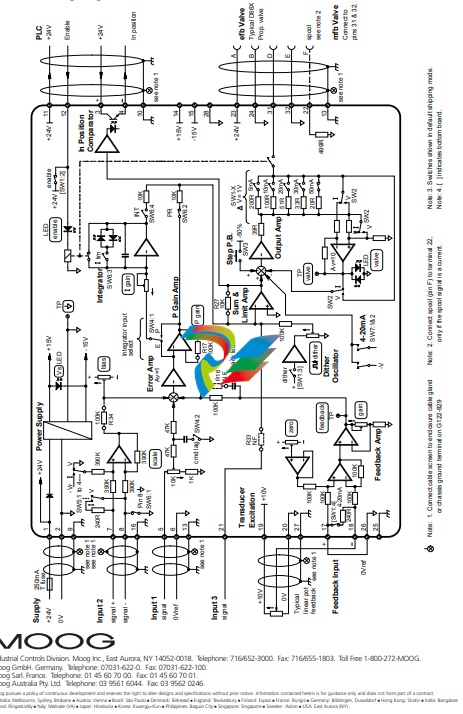
2 Description
The G122-829A001 is a general purpose, user configurable,
P-I servoamplifier. Selector switches inside the amplifier enable
either proportional control, integral control, or both to be
selected. Many aspects of the amplifier’s characteristics can
be adjusted with front panel pots or selected with internal
switches. This enables one amplifier to be used in many
different applications. Refer also to data sheet G122-829.
3 Installation
3.1 Placement
A horizontal DIN rail, mounted on the vertical rear surface
of an industrial steel enclosure, is the intended method of
mounting. The rail release clip of the G122-829A001 should
face down, so the front panel and terminal identifications
are readable and so the internal electronics receive a cooling
airflow.
An important consideration for the placement of the module
is electro magnetic interference (EMI) from other equipment
in the enclosure. For instance, VF and AC servo drives
can produce high levels of EMI. Always check the
EMC compliance of other equipment before placing
the G122-829A001 close by.
3.2 Cooling
Vents in the top and bottom sides of the G122-829A001 case
provide cooling for the electronics inside. These vents should
be left clear. It is important to ensure that equipment below
does not produce hot exhaust air that heats up the G122-829
3.3 Wiring
The use of crimp “boot lace ferrules” is recommended for the
screw terminals. Allow sufficient cable length so the circuit
card can be withdrawn from its case with the wires still
connected. This enables switch changes on the circuit card
to be made while the card is still connected and operating.
An extra 100mm, for cables going outside the enclosure,
as well as wires connecting to adjacent DIN rail units,
is adequate.
The screw terminals will accommodate wire sizes from
0.2mm2 to 2.5mm2 (24AWG to 12AWG). One Amp rated,
0.2mm2 should be adequate for all applications.
3.4 EMC
The G122-829A001 emits radiation well below the level called
for in its CE mark test. Therefore, no special precautions are
required for suppression of emissions. However, immunity from
external interfering radiation is dependent on careful wiring
techniques. The accepted method is to use screened cables for
all connections and to radially terminate the cable screens, in
an appropriate grounded cable gland, at the point of entry into
the industrial steel enclosure. If this is not possible, chassis
ground screw terminals are provided on the G122-829A001.
Exposed wires should be kept to a minimum length. Connect
the screens at both ends of the cable to chassis ground.
4 Power supply
24V DC nominal, 22 to 28V
75mA @ 24V without a load, 200mA @ 100mA load.
If an unregulated supply is used the bottom of the ripple
waveform is not to fall below 22V.
It is recommended that an M205, 250mA T (slow blow) fuse,
compliant with IEC127-2 sheet 3, be placed in series with the
+24V input to protect the electronic circuit. If terminal 23 is
used to power a proportional valve, the fuse should be
increased to cater for the extra current
Caution
If you intend to use the feedback amplifier adjusted for
4-20mA, don’t change the feedback gain or zero.
They are already adjusted for 4-20mA
To re-adjust for 4-20mA takes a little time, needs test
equipment and is tedious to do in the field.
6 Input configuration
Inputs 1, 2 and feedback go to the error amplifier and can be
used for feedback or command. Care needs to be taken in
selecting signal polarity to achieve negative feedback for
the overall closed loop. Since the input error amplifier sums
the signals, the transducer feedback signal needs to be the
opposite polarity of the command. This can be achieved in
two ways:
Arrange for an opposite polarity feedback transducer signal
and connect it to input 1, input 2 or the positive feedback
amplifier input.
If the feedback transducer signal is the same polarity as the
command, you only have one option: Connect it to the
negative input of the feedback amplifier.
6.1 Feedback input
An input to the error amplifier: The feedback amplifier is the
best choice for the feedback signal, for six reasons:
It leaves input 1 available for command. See 6.2 below.
It has inverting (negative) and non-inverting (positive) inputs.
It has zero and gain adjustment pots. This enables a signal
that does not go to zero volts and has less span than the
command, to be scaled up to the command. While this is
not essential, it helps when setting up and trouble-shooting.
There is a front panel test point for the zeroed and amplified
signal. This is very convenient (essential) for setting up and
trouble-shooting.
There is the option of a plug-in resistor, R16, to give a
feedback derivative (lead or D) in the output of the feedback
amplifier.
It can be set up for a current input by connecting a 240 Ohm
resistor between terminals 17 and 18 with the 4-20mA
switch ([SW1:4]).
Default
The feedback amplifier default set-up is 4-20mA flowing into
terminal 18 and out of terminal 17, producing an output of
0 to -10V. Reversing the terminals, and hence the current flow,
will not result in a 0 to +10V output. The feedback zero must
be adjusted for this arrangement.
Adjusting feedback amp for 4-20mA input and
0 to -10V output
Set the feedback gain to minimum (fully counter clockwise).
The trimpot has 15 turns and will click when minimum is
reached.
Connect terminal 17 to terminal 26 (ground).
Connect the positive of a variable DC power supply to
terminal 18 and the negative to terminal 26.
Connect a digital multimeter (DMM), on DC Volts, between
the front panel feedback amp and ground test points.
Set the variable supply to 0.96V.
Adjust the feedback amp zero trimpot until the DMM reads
0.00V.
Set the variable supply to 4.80V.
Adjust the feedback gain trimpot until the DMM reads
-10.00V.
Set the variable supply to 0.96V again and check the
feedback test point is still 0.00V. Trim if necessary and check
the 4.80V setting again
6.2 Input 1
An input to the error amplifier: This input is ±10V
non-inverting and has two important features:
It has a scale pot on its input that enables large inputs to be
scaled down to match smaller signals on other inputs. Scale
range is 10 to 100%. Set fully clockwise (FCW), an input of
100V can match a 10V signal on the other inputs. Note that
the maximum permissable input voltage is ±95V.
It has a switch selectable (SW4:2) lag of 55mS that can be
used to remove transients from the input signal that could
cause unwanted rapid movement in the output.
Input 1 is well suited to be a command because of these two
features. If input 1 is used for feedback, be sure the lag is
switched off. Input resistance after the scale pot is 94k Ohms.
6.3 Input 2
An input to the error amplifier: This input is differential, with
non-inverting and inverting inputs. It is switch selectable (SW5)
between 4-20mA and ±10V. The 4-20mA converter produces
0 to +10V for 4 to 20mA input to terminal 7. R34 connects
from the output of the amplifier to the input of the error amp.
It is a plug-in resistor with a default value of 100k Ohms,
giving a nominal ±10V input signal range when V is selected.
Input 2 is suitable for command or feedback. R34 can be
increased to give a larger input range.
Terminal 8, the inverting input, can be connected to ground
with SW6:1.
6.4 Input 3
An input to the output summing and limiting amplifier via a
plug-in resistor, R33. A typical use for this input is command
feed forward or closing the outer loop of a three stage valve.
With R33 at 10k Ohm, a ±10V input will produce ±100% valve
drive. Increasing R33 reduces the valve drive.
The summing amp gain can be changed with plug-in resistor
R27. This is useful if input 3 is being used to close the outer
loop of a three stage valve.
7 Output configuration
Select the output to match the input requirements of the valve
(SW2).
When voltage (V) is selected, ±10V is available into a
minimum load of 200 Ohm.
When current (I) is selected, the current level switches
(SW1:X) enable ±5 to ±100mA to be selected. The switch
selections sum, so, if for instance 45mA is required, select
30,10 and 5. The output can drive all known Moog valves
up to ±100mA. The maximum load at I (Amp) output is:
RL max = 11V – 39 Ohm
I (Amp)
eg. at 50mA RL max is 181 Ohm
When 4-20mA is selected, the output V/I switches must be
in I and the output current SW1 must have switch 3 selected
for 20mA. Maximum load for 4-20mA output is 500 Ohm.
The output amplifier is limited to approximately 105% of the
selected full scale output. If both the proportional and
integrator stages are saturated, the output will not be twice
the selected full scale but still only 105% of full scale.
8 Step push button
The step push button (SW3) injects -50% valve drive
disturbance into the output. When released, the valve drive
reverts to its original level. This feature is useful for closed loop
gain optimisation.
9 P-I selection
For position closed loops, initially select only P (SW6:2). For
pressure or velocity loops select I (SW6:4) initially and then P.
See paragraph 12 below for more detail. For a complete
discussion of P and I control, see the G122-202 servoamplifier
Application Notes (part no C31015).
10 Integrator input
The servoamplifier has a unity gain input error amplifier
followed by two parallel stages, one a proportional amplifier
and the other an integrator. The outputs of these two stages
can be switched to the output power amplifier (see paragraph
7 above) which then drives the valve.
The input to the integrator stage can be switch selected
(SW4:1) from either the output of the error amplifier, I in = E,
or the output of the proportional stage, I in = P. The latter
arrangement is used in the G122-202. It is beyond the scope
of these Application Notes to detail the benefits of each
arrangement. If you have experience with the G122-202,
I in = P would seem to be an easy choice.
11 P only gain
For position loops select only P control (SW6:2). Input a step
disturbance of 50% valve current with the step push button
(SW3). Adjust the P gain for the required stability, while
monitoring the front panel valve test point, or the feedback
signal. The gain range of the proportional amplifier can be
moved by changing the plug-in resistor R17. The value loaded
when shipped is 100k Ohms, which gives a 1 to 20 range.
Selecting 200k Ohms will give 2 to 40. The circuit will function
correctly with the value of R17 between 100k Ohms and
10M Ohms.
Note that as P gain is increased, the movement due to the step
push button decreases.
12 P and I gains together
If you are inexperienced with integral control the following
set-up method is a good starting point.
I in = E: Initially select only I (SW6:4). Press the step push
button (SW3). Increase I gain until one overshoot in the
feedback signal is observed.
Next select P (SW6:2) and I (SW6:4) together and increase the
P gain to reduce the overshoot.
For the I in = E arrangement the P and I sequence could be
reversed. i.e.: adjust P first, followed by I.
I in = P: For an I in = P arrangement, only the “P followed
by I” sequence of adjustment can be used.
For a more thorough discussion see G122-202 Application
Notes (part no C31015).
13 I limit
The contribution from the integrator to the output amplifier
can be reduced by selecting I limit on (SW6:3). When this
switch is on the integrator contribution is reduced to
approximately 15% of the level when it is off. This feature is
useful in a position loop that may require integral control to
achieve the required steady state accuracy. The limited integral
control removes valve null error when the final position is
reached. It is also useful in a pressure loop to limit overshoot,
if the valve drive saturates.
14 Dither
The dither frequency is fixed at 200Hz and the level is
adjustable with the front panel pot to ±10% of valve drive,
regardless of the type and level of valve drive selected. It can
be turned on or off with ([SW1:3]). Dither is seldom needed in
a position loop but can be beneficial in pressure or velocity
loops. Increase dither until it can just be detected in the
controlled variable, such as pressure or velocity. Dither can
compromise valve life, so it should be kept to a minimum.
15 Enable
A relay on the circuit card needs to be energised to connect
the output stage to its screw terminal and to un-clamp the
integrator. The clamp prevents integrator wind-up when the
loop is not operating. Supply 24V to the appropriate terminal
to energise the relay. The enable switch ([SW1:2]) on the circuit
card can be set to permanently energise the relay and provide
a permanent enable.
16 In position
When the valve drive signal falls below ±10% of the selected
full scale signal, the “in position” signal goes true and provides
an opto-isolated current path between the + and – terminals.
This can be connected to a PLC to initiate the next step in a
control sequence. Do not apply more than 40V to the +
terminal and ensure the load on the – terminal is less than
20mA.
The “in position” signal is not relevant for a velocity loop.
17 Withdrawing the circuit card
from its case
The circuit card needs to be withdrawn from its case to set the
selector switches, change the plug-in resistors and operate the
step push button.
To do this, push one cover release tab with a pen or
screwdriver, while gently pulling on the top cover on that side.
The cover will release approximately one mm. Repeat on the
second tab on that side. Repeat on the other side and then
withdraw the cover and circuit card until the required switches
are exposed. The rigidity of the connecting wires will hold the
circuit card in position while changes are made.
18 Specifications
Function: P, I, or P & I, switch selectable.
Input 1: Connects to error amp via 94k.
Scaled to 95V max with switch
selectable lag of 55mS.
Input 2: Differential 4-20mA or ±10V,
switch selectable.
Connects to error amp via R34.
±15V max.
Rin = 390k – ±10V.
Rin = 240R – 4-20mA.
R34 is plug-in, 100K (default).
Input 3: Connects to summing amp via R33.
R33 plug-in. ±10V gives ±100% valve
drive when R33 = 10k Ohm, ±10% when
R33 = 100k Ohm.
Feedback input: Differential 4-20mA or ±10V,
switch selectable.
±15V max.
Rin 100k – ±10V.
Rin 240R – 4-20mA.
Feedback amp: Zero, ±10V.
Gain, 1 to 10.
Derivative (velocity) feedback via
plug-in resistor R16 and fixed capacitor.
Transducer excitation: +10V @ 10mA max.
Error amp: Unity gain.
Bias ±1.5V.
Proportional amp gain: 1 to 20 with R17 = 100k (default).
Max gain 2000 with R17 = 10M.
Integrator gain: 1 to 45 per second.
Integrator input: Switch selectable from output of unity
gain error amp or proportional gain amp.
Enable: Relay, +24V @ 8mA, 17 to 32V.
Output amp: Switch selectable voltage, current or
4-20mA, single ended output, return
to ground.
V. ±10V, minimum load = 200 Ohm.
I. ±5, 10, 20, 30, 50mA to a maximum
of ±100mA.
max load = 11V – 39 Ohm
I (Amp)
4-20mA. Max load 500R.
Step push button: -50% valve drive disturbance.
Valve supply: Terminal 23, 300mA max.
In position: ±10% of valve drive. 20mA and 40V max
output to PLC.
Front panel Vs, internal supply – green
indicators: Valve drive positive – red
negative – green
Enable – yellow
In position – green
Front panel Valve ±10V (regardless of output
test points: signal selection)
Feedback amplifier output
signal 0V
Front panel Input 1 scale
trimpots: Error amp bias
(15 turns) P gain
I gain
Dither level
Feedback amp gain
Feedback amp zero
( )
Dither: 200 Hz fixed frequency.
±10% valve drive. Switch selectable
on/off.
Supply: Terminal 1,
24V nominal, 22 to 28V
75mA @ 24V, no valve current,
200mA @ 100mA valve current.
±15V output: Terminals 14 and 15,
± (110mA – max valve current).
Wire size range: 0.2mm2 to 2.5mm2
(24AWG to 12AWG).
Recommended M205, 250mA T (slow blow) fuse
supply protection: compliant to IEC127-2 sheet 3.
If terminal 23 is used to power a
proportional valve, the fuse should be
increased to cater for the extra current.
Mounting: DIN rail
IP 20
Temperature: 0 to +40ºC
Dimensions: 100W x 108H x 45D
Weight: 180g
CE mark: EN50081.1 emission
EN61000-6-2 immunity
C tick: AS4251.1 emission
19 Internet
www.moog.com/dinmodules
-
 HIRSCHMANN MSM20-M2M2M2M2SY9HH9E Ethernet media modul
HIRSCHMANN MSM20-M2M2M2M2SY9HH9E Ethernet media modul -
 HIRSCHMANN SPIDER-PL-20-05T1999999TWVHHHH Industrial Ethernet Rail Switch
HIRSCHMANN SPIDER-PL-20-05T1999999TWVHHHH Industrial Ethernet Rail Switch -
 Hirschmann SPIDER-PL-20-07T1M2M299TWVHHHH Industrial ETHERNET Rail Switch
Hirschmann SPIDER-PL-20-07T1M2M299TWVHHHH Industrial ETHERNET Rail Switch -
.png) Hirschmann (Belden) RS20-1600M2M2SDAEHC09.1.00 DIN-rail managed industrial Fast Ethernet switch
Hirschmann (Belden) RS20-1600M2M2SDAEHC09.1.00 DIN-rail managed industrial Fast Ethernet switch -
 Hirschmann (Belden) RS30-1602O6O6TDAPHC09.1.00 DIN-rail managed industrial Ethernet switch
Hirschmann (Belden) RS30-1602O6O6TDAPHC09.1.00 DIN-rail managed industrial Ethernet switch -
 Hirschmann (Belden) RS30-2402O6T1SDAPHH09.0.13 DIN-rail industrial Ethernet switch
Hirschmann (Belden) RS30-2402O6T1SDAPHH09.0.13 DIN-rail industrial Ethernet switch -
Hirschmann (Belden) SPIDER-PL-20-04T1S29999TY9HHHH Ethernet DIN-rail switch
-
 HIRSCHMANN RS20-1600T1T1SDAUHX Switch
HIRSCHMANN RS20-1600T1T1SDAUHX Switch -
 HIRSCHMANN BRS42-0012OOOO-SPCZ99HHSES industrial switch
HIRSCHMANN BRS42-0012OOOO-SPCZ99HHSES industrial switch -
 Hirschmann RS20-0800S2S2TDHPHH09.0.14 Fast Ethernet DIN rail switch.
Hirschmann RS20-0800S2S2TDHPHH09.0.14 Fast Ethernet DIN rail switch. -
 HIRSCHMANN MM20-Z6Z6M2M2SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-Z6Z6M2M2SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-Z6Z6T1T1SAHH hot-swappable hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-Z6Z6T1T1SAHH hot-swappable hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-P9P9T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-P9P9T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M4T1T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-M4T1T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M4M4T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-M4M4T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M2M2M2M2SZHH Ethernet media module
HIRSCHMANN MM20-M2M2M2M2SZHH Ethernet media module -
HIRSCHMANN MM20-M2M2M2M2SAHH Ethernet media module
-
 HIRSCHMANN MM20-T1T1T1T1EBH 4-port Fast Ethernet Copper Cable Media Module
HIRSCHMANN MM20-T1T1T1T1EBH 4-port Fast Ethernet Copper Cable Media Module -
HIRSCHMANN MM20-T1T1T1T1SAHH 4-port Fast Ethernet Copper Cable Media Module
-
HIRSCHMANN MM20-T1T1T1T1SAHH 4-port Fast Ethernet Copper Cable Media Module
-
 HIRSCHMANN MM20-Z6Z6EBH Hot-swappable fast Ethernet media module
HIRSCHMANN MM20-Z6Z6EBH Hot-swappable fast Ethernet media module -
 HIRSCHMANN MM20-Z6Z6SAHH Ethernet media module
HIRSCHMANN MM20-Z6Z6SAHH Ethernet media module -
HIRSCHMANN MM20-Z6Z6Z6Z6EBH Industrial Media Module
-
 MSM40-T1T1T1TZ9HH9E99.9.99 HIRSCHMANN Switch
MSM40-T1T1T1TZ9HH9E99.9.99 HIRSCHMANN Switch -
 HIRSCHMANN MS20-0800SAAEHC / MS20-0800SAAEHC0 8-port modular Layer 2 management Ethernet switch
HIRSCHMANN MS20-0800SAAEHC / MS20-0800SAAEHC0 8-port modular Layer 2 management Ethernet switch -
 Hirschmann RSPM20-4T14T1SZ9HHS9 Switch RSPM20-4T14T1SZ9HHS9
Hirschmann RSPM20-4T14T1SZ9HHS9 Switch RSPM20-4T14T1SZ9HHS9 -
 HIRSCHMANN RS20-1600M2M2SDAEHH09.1. RS20/30/40 Managed Switch configurator
HIRSCHMANN RS20-1600M2M2SDAEHH09.1. RS20/30/40 Managed Switch configurator -
HIRSCHMANN RS20-1600M2M2SDAEHX09.0.00 Ethernet switch
-
 HIRSCHMANN BELDEN SPIDER-PL-20-07T1M2M299TY9HHHH / SPIDERPL2007T1M2M299TY9HHHH
HIRSCHMANN BELDEN SPIDER-PL-20-07T1M2M299TY9HHHH / SPIDERPL2007T1M2M299TY9HHHH -
HIRSCHMANN MM3-1FXS2/3TX1 Switching Board Module
-
 HIRSCHMANN RSPE30-24044O7T99-ECCP999HHSE2A08.1.00 Industrial-grade fanless management-type Ethernet switch
HIRSCHMANN RSPE30-24044O7T99-ECCP999HHSE2A08.1.00 Industrial-grade fanless management-type Ethernet switch -
 HIRSCHMANN RS30-1602OOZZSDAEHC09.1.00 DIN-rail-mounted managed Layer 2 Ethernet switch
HIRSCHMANN RS30-1602OOZZSDAEHC09.1.00 DIN-rail-mounted managed Layer 2 Ethernet switch -
 HIRSCHMANN MACH104-20TX-F Managed 24-port Full Gigabit 19" Switch
HIRSCHMANN MACH104-20TX-F Managed 24-port Full Gigabit 19" Switch -
 HIRSCHMANN Switch RS20-0800M4M4SDAE
HIRSCHMANN Switch RS20-0800M4M4SDAE -
Hirschmann RS30-1602O6O6SDAEHH09.1. Management-type Ethernet switch
-
 Hirschmann RS30-1602OOZZSDAEHC09.0.10 Open rack-style Ethernet switch
Hirschmann RS30-1602OOZZSDAEHC09.0.10 Open rack-style Ethernet switch -
 HIRSCHMANN RSPE30-24044O7T99-SCCV999HHSI2SXX.X.XX High-Availability Seamless Redundancy
HIRSCHMANN RSPE30-24044O7T99-SCCV999HHSI2SXX.X.XX High-Availability Seamless Redundancy -
HIRSCHMANN RSPE30-24044O7T99-SCCZ999HHSE2A DIN-rail Ethernet switch
-
HIRSCHMANN MM2-4TX1-EEC switch
-
HIRSCHMANN MSM40-T1T1T1T1TZ9HH9E99.9.99 Module
-
 HIRSCHMANN RS20 Rail Switch RS20-0400S4T1SDAEHC07.1.01
HIRSCHMANN RS20 Rail Switch RS20-0400S4T1SDAEHC07.1.01 -
 HIRSCHMANN M4-FAST8-SFP Fast Ethernet media module
HIRSCHMANN M4-FAST8-SFP Fast Ethernet media module -
 HIRSCHMANN RS20-0400M2T1SDAP Managed Fast-Ethernet-Switch
HIRSCHMANN RS20-0400M2T1SDAP Managed Fast-Ethernet-Switch -
 HIRSCHMANN BELDEN SPIDER II 8TX/1FX EEC Industrial Ethernet Rail Switch
HIRSCHMANN BELDEN SPIDER II 8TX/1FX EEC Industrial Ethernet Rail Switch -
HIRSCHMANN MM3-2FXS2/2TX1
-
 HIRSCHMANN RS2-4TX/1FX EEC Industrial Ethernet Rail Switch
HIRSCHMANN RS2-4TX/1FX EEC Industrial Ethernet Rail Switch -
 RS30-0802O6O6SDAEHC09.0.10 HIRSCHMANN Switch
RS30-0802O6O6SDAEHC09.0.10 HIRSCHMANN Switch -
 HIRSCHMANN m4-8TP-RJ45 Ethernet Media Module
HIRSCHMANN m4-8TP-RJ45 Ethernet Media Module -
 HIRSCHMANN MSP30-24040SCZ9URHHE3A switch
HIRSCHMANN MSP30-24040SCZ9URHHE3A switch -
 Hirschmann rack MS30-1602SAAPHC
Hirschmann rack MS30-1602SAAPHC -
 HIRSCHMANN RS2-FX/FX Industrial Switch Module
HIRSCHMANN RS2-FX/FX Industrial Switch Module -
Rs1txfx - Hirschmann - Rs1-Tx/Fx Rail Switch
-
RS20-0800S2S2SDAEHC09.1.00 HIRSCHMANN Commutator
-
 Hirschmann EAGLE20 TX/TX Industrial Security Router
Hirschmann EAGLE20 TX/TX Industrial Security Router -
 Hirschmann SPIDER-SL-20-04T1S29999SY9HHHH Industrial Switch
Hirschmann SPIDER-SL-20-04T1S29999SY9HHHH Industrial Switch -
 HIRSCHMANN MAR1040-4C4C4C4C9999SMMHRHHXX.X. Gigabit Ethernet Switch configurator
HIRSCHMANN MAR1040-4C4C4C4C9999SMMHRHHXX.X. Gigabit Ethernet Switch configurator -
 Hirschmann MAR1040 Industrial Switch
Hirschmann MAR1040 Industrial Switch -
 HIRSCHMANN BELDEN RS30-1602O6O6SDAE
HIRSCHMANN BELDEN RS30-1602O6O6SDAE -
Hirschmann RS20-1600M2M2SDAUHC Ethernet DIN rail switch
-
 HIRSCHMANN OCTOPUS 24M industrial switch
HIRSCHMANN OCTOPUS 24M industrial switch -
 HIRSCHMANN RS20-1600T1T1SDAE Management-type Ethernet switch
HIRSCHMANN RS20-1600T1T1SDAE Management-type Ethernet switch -
 HIRSCHMANN RS20-1600T1T1SDAUHH industrial switch
HIRSCHMANN RS20-1600T1T1SDAUHH industrial switch -
HIRSCHMANN RS20-0800M2M2SDAPHC09.0.04 switch
-
 Hirschmann MR 8-03 24V DC Industrial Modular Bridge/Router
Hirschmann MR 8-03 24V DC Industrial Modular Bridge/Router -
 HIRSCHMANN RS20-0400M2T1SDAPHC08.0.01 Managed Switch
HIRSCHMANN RS20-0400M2T1SDAPHC08.0.01 Managed Switch -
 MACH1130 Hirschmann Industrial Switch
MACH1130 Hirschmann Industrial Switch -
 HIRSCHMANN 943824-002 SPIDER 5TX Industrial Ethernet Switch
HIRSCHMANN 943824-002 SPIDER 5TX Industrial Ethernet Switch -
 HIRSCHMANN RS30-0802O6O6SDAEHC09.1.00 Managed Industrial Switch
HIRSCHMANN RS30-0802O6O6SDAEHC09.1.00 Managed Industrial Switch -
 HIRSCHMANN RS20-0400M2M2TDAEHC04.0.01 Industrial Switch
HIRSCHMANN RS20-0400M2M2TDAEHC04.0.01 Industrial Switch -
 HIRSCHMANN BRS20-0600Z6Z6-STCZ99HHSES Industrial Switch
HIRSCHMANN BRS20-0600Z6Z6-STCZ99HHSES Industrial Switch -
 HIRSCHMANN MACH104-20TX-FR-L3P Industrial Ethernet Switch
HIRSCHMANN MACH104-20TX-FR-L3P Industrial Ethernet Switch -
 HIRSCHMANN RS40-0009CCCCEDBPHH06.0.01 Industrial Switch
HIRSCHMANN RS40-0009CCCCEDBPHH06.0.01 Industrial Switch -
 HIRSCHMANN RS2-3TX/2FX EEC Industrial Ethernet Switch
HIRSCHMANN RS2-3TX/2FX EEC Industrial Ethernet Switch -
 Hirschmann MACH 1020/1030 Fast/Gigabit Rack Mount Switches
Hirschmann MACH 1020/1030 Fast/Gigabit Rack Mount Switches -
HIRSCHMANN RS20-0800M2M2SDAPHC09.0.14 Industrial Switch
-
 HIRSCHMANN RS20-1600T1T1SDAEHC09.0.04 Industrial Switch
HIRSCHMANN RS20-1600T1T1SDAEHC09.0.04 Industrial Switch -
 HIRSCHMANN RSB20-0800T1T1EAABHH Industrial Switch
HIRSCHMANN RSB20-0800T1T1EAABHH Industrial Switch -
 HIRSCHMANN MACH4002-48+4G-L3E Industrial Backbone Switch
HIRSCHMANN MACH4002-48+4G-L3E Industrial Backbone Switch -
 HIRSCHMANN RS20-0400S2T1SDAE Industrial Managed Switch
HIRSCHMANN RS20-0400S2T1SDAE Industrial Managed Switch -
HIRSCHMANN RS20-0800S2T1SDAUHC Industrial Switch
-
 HIRSCHMANN RS20-2400S4S4SDAEHC09.0.14 industrial switch
HIRSCHMANN RS20-2400S4S4SDAEHC09.0.14 industrial switch -
 HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch
HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch -
HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch
-
 HIRSCHMANN RS40-0009CCCCSDAEHH09.0.14 switch
HIRSCHMANN RS40-0009CCCCSDAEHH09.0.14 switch -
 Hirschmann RS20-1600T1T1SDAUHC Management-type Ethernet Switch
Hirschmann RS20-1600T1T1SDAUHC Management-type Ethernet Switch -
 Hirschmann M1-8SFP Switche
Hirschmann M1-8SFP Switche -
Hirschmann Industrial Ethernet Ruggedized Switch MACH1000 Family
-
 Basler Electric, Solid State Protective Relay, BE1-60
Basler Electric, Solid State Protective Relay, BE1-60 -
BASLER ELECTRIC SR4A-2B15B3A Static Voltage Regulator
-
.png) BASLER ELECTRIC EXCITER DIODE MONITOR EDM-200
BASLER ELECTRIC EXCITER DIODE MONITOR EDM-200 -
.png) BASLER ELECTRIC DECS125-15-B2C5 DIGITAL EXCITATION CONTROL SYSTEM V 2.0.9
BASLER ELECTRIC DECS125-15-B2C5 DIGITAL EXCITATION CONTROL SYSTEM V 2.0.9 -
 BASLER ELECTRIC BE1-851 OVERCURRENT PROTECTION RELAY MECHANISM
BASLER ELECTRIC BE1-851 OVERCURRENT PROTECTION RELAY MECHANISM -
 Basler Electric BE1-51A / BE151A
Basler Electric BE1-51A / BE151A -
 Basler Electric BE1-40Q Loss of Excitation Relay
Basler Electric BE1-40Q Loss of Excitation Relay -
 Basler Electric BE1-87G Variable Percentage Differential Relay
Basler Electric BE1-87G Variable Percentage Differential Relay -
 Basler Electric BE1-11 Protection System I5A3M2P2N0EA00
Basler Electric BE1-11 Protection System I5A3M2P2N0EA00 -
 BASLER ELECTRIC DECS-200-1C Digital Excitation Control System
BASLER ELECTRIC DECS-200-1C Digital Excitation Control System -
 Basler Electric / Kohler BE1-11g Generator Protection Relay G5A3M2J2N0E000
Basler Electric / Kohler BE1-11g Generator Protection Relay G5A3M2J2N0E000 -
BASLER ELECTRIC DECS125-15 DIGITAL EXCITATION CONTROL SYSTEM
-
 BASLER ELECTRIC BE1-951 OverCurrent Protecton System
BASLER ELECTRIC BE1-951 OverCurrent Protecton System -
Basler Electric DECS-200-1L Digital Excitation Control System
-
 Basler Electric DGC-2020HD-5NS1DNSBA Digital Genset Controller -
Basler Electric DGC-2020HD-5NS1DNSBA Digital Genset Controller - -
 BASLER ELECTRIC BE1-81T1EE1WA0N1F / BE181T1EE1WA0N1F
BASLER ELECTRIC BE1-81T1EE1WA0N1F / BE181T1EE1WA0N1F -
 BASLER ELECTRIC BE1-25M1EA6PN5R1F / BE125M1EA6PN5R1F
BASLER ELECTRIC BE1-25M1EA6PN5R1F / BE125M1EA6PN5R1F -
 BASLER ELECTRIC DECS-250-LN1SN1N DIGITAL EXCITATION CONTROL SYSTEM
BASLER ELECTRIC DECS-250-LN1SN1N DIGITAL EXCITATION CONTROL SYSTEM -
Basler Electric DECS-250-CN2CN 1N Digital Excitation Control System Unit
-
 BASLER ELECTRIC DECS-300-C0N0 DIGITAL EXCITATION CONTROL SYSTEM
BASLER ELECTRIC DECS-300-C0N0 DIGITAL EXCITATION CONTROL SYSTEM -
 BASLER ELECTRIC BE1-87T-A1E-A1J-D0S1F / BE187TA1EA1JD0S1F
BASLER ELECTRIC BE1-87T-A1E-A1J-D0S1F / BE187TA1EA1JD0S1F -
BASLER ELECTRIC BE1-11-G6D1M0J2P0E000 Protection System
-
 BASLER ELECTRIC BE1-GPS100-E4N1H1N GENERATOR PROTECTION SYSTEM
BASLER ELECTRIC BE1-GPS100-E4N1H1N GENERATOR PROTECTION SYSTEM -
 Jaquet Relay card (Auxiliary module) FTV 3090 377Z-03985
Jaquet Relay card (Auxiliary module) FTV 3090 377Z-03985 -
 Jaquet Trip Chain Control card FTBU 3034 377Z-05030
Jaquet Trip Chain Control card FTBU 3034 377Z-05030 -
 Jaquet with input card -E04 FTFU 3024 -E04 377Z-05855
Jaquet with input card -E04 FTFU 3024 -E04 377Z-05855 -
 Jaquet with input card -E03 FTFU 3024- E03 377Z-03983
Jaquet with input card -E03 FTFU 3024- E03 377Z-03983 -
 Jaquet FTFU 3024- E02 377Z-03982 with input card -E02
Jaquet FTFU 3024- E02 377Z-03982 with input card -E02 -
 Jaquet FTFU 3024-E01 377Z-03981 with input card -E01
Jaquet FTFU 3024-E01 377Z-03981 with input card -E01 -
 Hirschmann RS20-2400T1T1SDAE Industrial Managed Ethernet Switch
Hirschmann RS20-2400T1T1SDAE Industrial Managed Ethernet Switch -
 Hirschmann BELDEN EAGLE30-04022O6TT999SCCV9HSE3F
Hirschmann BELDEN EAGLE30-04022O6TT999SCCV9HSE3F -
 Hirschmann MM3-2FXS2/2TX MICE Media Module
Hirschmann MM3-2FXS2/2TX MICE Media Module -
 Hirschmann RS20-1600M2M2SDAPHC08.0.05 Industrial Managed Switch
Hirschmann RS20-1600M2M2SDAPHC08.0.05 Industrial Managed Switch -
 Hirschmann OZD Profi 12M G12-1300 PRO Fieldbus Repeater
Hirschmann OZD Profi 12M G12-1300 PRO Fieldbus Repeater -
Hirschmann SPIDER 4TX/1FX-ST EEC Industrial Ethernet Switch
-
 Hirschmann MM2-2FXM3/2TX1 MICE Media Module
Hirschmann MM2-2FXM3/2TX1 MICE Media Module -
 Hirschmann RS20-2400M2M2SDAPHC09.0.14 Industrial Switch
Hirschmann RS20-2400M2M2SDAPHC09.0.14 Industrial Switch -
 Hirschmann RS20-0400M2M2SDAEHC07.1.05 OpenRail Switch
Hirschmann RS20-0400M2M2SDAEHC07.1.05 OpenRail Switch -
 Hirschmann OZD Profi 12M G12-EEC Fieldbus Repeater
Hirschmann OZD Profi 12M G12-EEC Fieldbus Repeater -
HIRSCHMANN MDA422-1/2-3.5c-23/46 sensor
-
Hirschmann RS30-2402T1T1SDAUHC Managed Industrial Switch


