
GESPEEDTRONIC™ MARK V STEAM TURBINE CONTROL SYSTEM
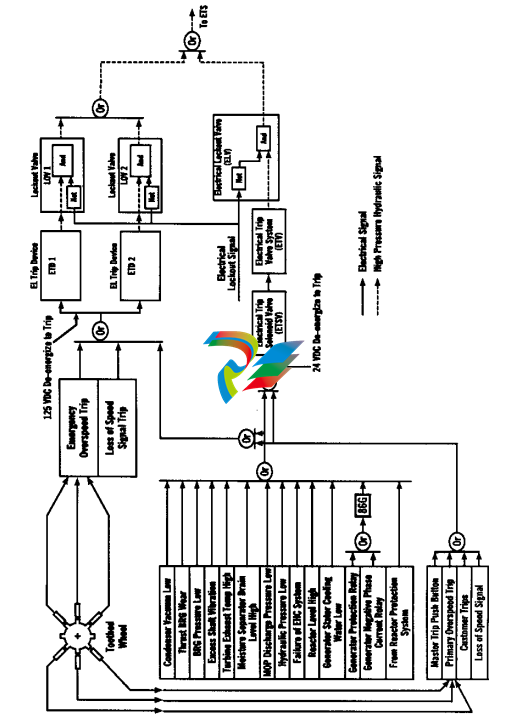
hydraulic pressure signal, which will cause rapid
closure of all steam admission valves when depressurized. The critical inputs to the ETS can be tested on-line, one at a time, with the help of the lockout valves located immediately to the left of the
final output to the ETS. This diagram shows the
standard offering with an all-electronic overspeed
trip. Optionally, a system with a mechanical overspeed governor can be supplied.

SPEEDTRONIC MARK V
CONTROL CONFIGURATION
Figure 5 shows the configuration for the
SPEEDTRONIC Mark V triple modular redundant (TMR) control system for a medium to large
steam turbine with redundant operator interfaces.
The core of this system is the three identical controllers called <R>, <S>, and <T>. All critical control algorithms, protective functions, and sequencing are performed by these processors. In so
doing, they also acquire the data needed and generate outputs to the turbine. Protective outputs
are routed through the <P> module consisting of
triple redundant processors <X>, <Y>, and <Z>,
which also provide independent protection for
certain critical functions such as overspeed.
The three control processors, <R>, <S>, and
<T>, acquire data from the triple-redundant sensors as well as from dual or single sensors. A
generic complement of sensors is described in
Table 3. The actual number of sensors will
depend on turbine type. All critical sensors for
continuous controls, as well as protection, are
triple-redundant. Other sensors are dual or single
devices fanned out to all three control processors.
The extremely high reliability achieved by TMR
control systems is due in considerable measure to
the use of triple sensors for all critical parameters,
as it was first demonstrated with the triple-redundant protection system of the EHC Mark II.
MARK V ELECTRONICS
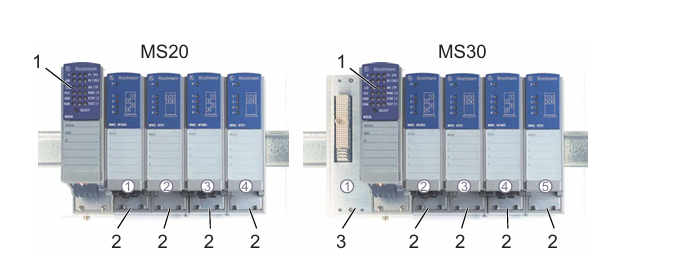
All of the microprocessor-based controls have a
modular design for ease of maintenance. Each
module or controller contains up to five cards,
including a power supply. Multiple processors
reside in each controller which distribute the processing for maximum performance. Individual
processors are dedicated to specific I/O assignments, application software, communications, etc.,
and the processing is performed in a real-time,
multi-tasking operating system. Communication
between the controller’s five cards is accomplished
with ribbon cables and gas-tight connectors. This
eliminates the traditional computer backplane.
Communication between individual controllers is
performed on high-speed Arcnet links.
Figure 4 shows the standard microprocessor
module.
PRIMARY CONTROLLERS
<R><S><T>
The three controllers <R>, <S>, and <T>, shown
in Figure 5, are physically separate and independent modules that contain all control and protection hardware and software. A failure in any of the
three controllers is automatically diagnosed to the
card level and displayed as an alarm message.
Maintenance personnel can power down the
appropriate controller and replace the defective
card while the turbine is on-line. Redundant sensors are used in control and trip protection systems
to provide a “total system” fault-tolerant design. As
a result, diagnostics are able to distinguish between
redundant sensor failures and electronics failures.
Three basic forms of voting are used in the control. Figure 6 shows how the first form of voting,
the software implemented fault tolerance (SIFT),
works. At the beginning of each computing time
frame, each controller independently reads its sensors and exchanges this data with the data from
the other two controllers. The median value of
each analog input is calculated in each controller
and then used as the resultant control parameter
for that controller. Diagnostic algorithms monitor
a predefined deadband for each analog input to
each controller, and if one of the analog inputs
deviates from this deadband, a diagnostic alarm is
initiated to advise maintenance personnel.
Contact inputs are voted in a similar manner.
Each contact input connects to a single terminal
point and is parallel wired to three contact input
cards in the voted contact input module. Each
card optically isolates the 125 V dc input, and then
a dedicated 80196 processor in each card time
stamps the input to within 1 ms resolution. These
signals are then transmitted to the <R>, <S>, and
<T> controllers for voting and execution of the
application software. This technique eliminates
any single point failure in the software voting system. Redundant contact inputs for certain functions such as low lube oil pressure are connected
to three separate terminal points and then individually voted. With this SIFT technique, multiple
failures of contact or analog inputs can be accepted by the control system without causing an erroneous analog or trip command from any of the
three controllers as long as the failures are not
from the same circuit.
8
F
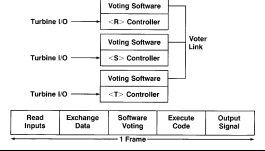
Figure 6. Software implemented fault tolerance
(SIFT)
A second form of voting is hardware voting of
analog outputs. As illustrated in Figure 7, three
coil servo valves on the steam valve actuators are
-
 HIRSCHMANN MSM20-M2M2M2M2SY9HH9E Ethernet media modul
HIRSCHMANN MSM20-M2M2M2M2SY9HH9E Ethernet media modul -
 HIRSCHMANN SPIDER-PL-20-05T1999999TWVHHHH Industrial Ethernet Rail Switch
HIRSCHMANN SPIDER-PL-20-05T1999999TWVHHHH Industrial Ethernet Rail Switch -
 Hirschmann SPIDER-PL-20-07T1M2M299TWVHHHH Industrial ETHERNET Rail Switch
Hirschmann SPIDER-PL-20-07T1M2M299TWVHHHH Industrial ETHERNET Rail Switch -
.png) Hirschmann (Belden) RS20-1600M2M2SDAEHC09.1.00 DIN-rail managed industrial Fast Ethernet switch
Hirschmann (Belden) RS20-1600M2M2SDAEHC09.1.00 DIN-rail managed industrial Fast Ethernet switch -
 Hirschmann (Belden) RS30-1602O6O6TDAPHC09.1.00 DIN-rail managed industrial Ethernet switch
Hirschmann (Belden) RS30-1602O6O6TDAPHC09.1.00 DIN-rail managed industrial Ethernet switch -
 Hirschmann (Belden) RS30-2402O6T1SDAPHH09.0.13 DIN-rail industrial Ethernet switch
Hirschmann (Belden) RS30-2402O6T1SDAPHH09.0.13 DIN-rail industrial Ethernet switch -
Hirschmann (Belden) SPIDER-PL-20-04T1S29999TY9HHHH Ethernet DIN-rail switch
-
 HIRSCHMANN RS20-1600T1T1SDAUHX Switch
HIRSCHMANN RS20-1600T1T1SDAUHX Switch -
 HIRSCHMANN BRS42-0012OOOO-SPCZ99HHSES industrial switch
HIRSCHMANN BRS42-0012OOOO-SPCZ99HHSES industrial switch -
 Hirschmann RS20-0800S2S2TDHPHH09.0.14 Fast Ethernet DIN rail switch.
Hirschmann RS20-0800S2S2TDHPHH09.0.14 Fast Ethernet DIN rail switch. -
 HIRSCHMANN MM20-Z6Z6M2M2SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-Z6Z6M2M2SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-Z6Z6T1T1SAHH hot-swappable hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-Z6Z6T1T1SAHH hot-swappable hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-P9P9T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-P9P9T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M4T1T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-M4T1T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M4M4T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-M4M4T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M2M2M2M2SZHH Ethernet media module
HIRSCHMANN MM20-M2M2M2M2SZHH Ethernet media module -
HIRSCHMANN MM20-M2M2M2M2SAHH Ethernet media module
-
 HIRSCHMANN MM20-T1T1T1T1EBH 4-port Fast Ethernet Copper Cable Media Module
HIRSCHMANN MM20-T1T1T1T1EBH 4-port Fast Ethernet Copper Cable Media Module -
HIRSCHMANN MM20-T1T1T1T1SAHH 4-port Fast Ethernet Copper Cable Media Module
-
HIRSCHMANN MM20-T1T1T1T1SAHH 4-port Fast Ethernet Copper Cable Media Module
-
 HIRSCHMANN MM20-Z6Z6EBH Hot-swappable fast Ethernet media module
HIRSCHMANN MM20-Z6Z6EBH Hot-swappable fast Ethernet media module -
 HIRSCHMANN MM20-Z6Z6SAHH Ethernet media module
HIRSCHMANN MM20-Z6Z6SAHH Ethernet media module -
HIRSCHMANN MM20-Z6Z6Z6Z6EBH Industrial Media Module
-
 MSM40-T1T1T1TZ9HH9E99.9.99 HIRSCHMANN Switch
MSM40-T1T1T1TZ9HH9E99.9.99 HIRSCHMANN Switch -
 HIRSCHMANN MS20-0800SAAEHC / MS20-0800SAAEHC0 8-port modular Layer 2 management Ethernet switch
HIRSCHMANN MS20-0800SAAEHC / MS20-0800SAAEHC0 8-port modular Layer 2 management Ethernet switch -
 Hirschmann RSPM20-4T14T1SZ9HHS9 Switch RSPM20-4T14T1SZ9HHS9
Hirschmann RSPM20-4T14T1SZ9HHS9 Switch RSPM20-4T14T1SZ9HHS9 -
 HIRSCHMANN RS20-1600M2M2SDAEHH09.1. RS20/30/40 Managed Switch configurator
HIRSCHMANN RS20-1600M2M2SDAEHH09.1. RS20/30/40 Managed Switch configurator -
HIRSCHMANN RS20-1600M2M2SDAEHX09.0.00 Ethernet switch
-
 HIRSCHMANN BELDEN SPIDER-PL-20-07T1M2M299TY9HHHH / SPIDERPL2007T1M2M299TY9HHHH
HIRSCHMANN BELDEN SPIDER-PL-20-07T1M2M299TY9HHHH / SPIDERPL2007T1M2M299TY9HHHH -
HIRSCHMANN MM3-1FXS2/3TX1 Switching Board Module
-
 HIRSCHMANN RSPE30-24044O7T99-ECCP999HHSE2A08.1.00 Industrial-grade fanless management-type Ethernet switch
HIRSCHMANN RSPE30-24044O7T99-ECCP999HHSE2A08.1.00 Industrial-grade fanless management-type Ethernet switch -
 HIRSCHMANN RS30-1602OOZZSDAEHC09.1.00 DIN-rail-mounted managed Layer 2 Ethernet switch
HIRSCHMANN RS30-1602OOZZSDAEHC09.1.00 DIN-rail-mounted managed Layer 2 Ethernet switch -
 HIRSCHMANN MACH104-20TX-F Managed 24-port Full Gigabit 19" Switch
HIRSCHMANN MACH104-20TX-F Managed 24-port Full Gigabit 19" Switch -
 HIRSCHMANN Switch RS20-0800M4M4SDAE
HIRSCHMANN Switch RS20-0800M4M4SDAE -
Hirschmann RS30-1602O6O6SDAEHH09.1. Management-type Ethernet switch
-
 Hirschmann RS30-1602OOZZSDAEHC09.0.10 Open rack-style Ethernet switch
Hirschmann RS30-1602OOZZSDAEHC09.0.10 Open rack-style Ethernet switch -
 HIRSCHMANN RSPE30-24044O7T99-SCCV999HHSI2SXX.X.XX High-Availability Seamless Redundancy
HIRSCHMANN RSPE30-24044O7T99-SCCV999HHSI2SXX.X.XX High-Availability Seamless Redundancy -
HIRSCHMANN RSPE30-24044O7T99-SCCZ999HHSE2A DIN-rail Ethernet switch
-
HIRSCHMANN MM2-4TX1-EEC switch
-
HIRSCHMANN MSM40-T1T1T1T1TZ9HH9E99.9.99 Module
-
 HIRSCHMANN RS20 Rail Switch RS20-0400S4T1SDAEHC07.1.01
HIRSCHMANN RS20 Rail Switch RS20-0400S4T1SDAEHC07.1.01 -
 HIRSCHMANN M4-FAST8-SFP Fast Ethernet media module
HIRSCHMANN M4-FAST8-SFP Fast Ethernet media module -
 HIRSCHMANN RS20-0400M2T1SDAP Managed Fast-Ethernet-Switch
HIRSCHMANN RS20-0400M2T1SDAP Managed Fast-Ethernet-Switch -
 HIRSCHMANN BELDEN SPIDER II 8TX/1FX EEC Industrial Ethernet Rail Switch
HIRSCHMANN BELDEN SPIDER II 8TX/1FX EEC Industrial Ethernet Rail Switch -
HIRSCHMANN MM3-2FXS2/2TX1
-
 HIRSCHMANN RS2-4TX/1FX EEC Industrial Ethernet Rail Switch
HIRSCHMANN RS2-4TX/1FX EEC Industrial Ethernet Rail Switch -
 RS30-0802O6O6SDAEHC09.0.10 HIRSCHMANN Switch
RS30-0802O6O6SDAEHC09.0.10 HIRSCHMANN Switch -
 HIRSCHMANN m4-8TP-RJ45 Ethernet Media Module
HIRSCHMANN m4-8TP-RJ45 Ethernet Media Module -
 HIRSCHMANN MSP30-24040SCZ9URHHE3A switch
HIRSCHMANN MSP30-24040SCZ9URHHE3A switch -
 Hirschmann rack MS30-1602SAAPHC
Hirschmann rack MS30-1602SAAPHC -
 HIRSCHMANN RS2-FX/FX Industrial Switch Module
HIRSCHMANN RS2-FX/FX Industrial Switch Module -
Rs1txfx - Hirschmann - Rs1-Tx/Fx Rail Switch
-
RS20-0800S2S2SDAEHC09.1.00 HIRSCHMANN Commutator
-
 Hirschmann EAGLE20 TX/TX Industrial Security Router
Hirschmann EAGLE20 TX/TX Industrial Security Router -
 Hirschmann SPIDER-SL-20-04T1S29999SY9HHHH Industrial Switch
Hirschmann SPIDER-SL-20-04T1S29999SY9HHHH Industrial Switch -
 HIRSCHMANN MAR1040-4C4C4C4C9999SMMHRHHXX.X. Gigabit Ethernet Switch configurator
HIRSCHMANN MAR1040-4C4C4C4C9999SMMHRHHXX.X. Gigabit Ethernet Switch configurator -
 Hirschmann MAR1040 Industrial Switch
Hirschmann MAR1040 Industrial Switch -
 HIRSCHMANN BELDEN RS30-1602O6O6SDAE
HIRSCHMANN BELDEN RS30-1602O6O6SDAE -
Hirschmann RS20-1600M2M2SDAUHC Ethernet DIN rail switch
-
 HIRSCHMANN OCTOPUS 24M industrial switch
HIRSCHMANN OCTOPUS 24M industrial switch -
 HIRSCHMANN RS20-1600T1T1SDAE Management-type Ethernet switch
HIRSCHMANN RS20-1600T1T1SDAE Management-type Ethernet switch -
 HIRSCHMANN RS20-1600T1T1SDAUHH industrial switch
HIRSCHMANN RS20-1600T1T1SDAUHH industrial switch -
HIRSCHMANN RS20-0800M2M2SDAPHC09.0.04 switch
-
 Hirschmann MR 8-03 24V DC Industrial Modular Bridge/Router
Hirschmann MR 8-03 24V DC Industrial Modular Bridge/Router -
 HIRSCHMANN RS20-0400M2T1SDAPHC08.0.01 Managed Switch
HIRSCHMANN RS20-0400M2T1SDAPHC08.0.01 Managed Switch -
 MACH1130 Hirschmann Industrial Switch
MACH1130 Hirschmann Industrial Switch -
 HIRSCHMANN 943824-002 SPIDER 5TX Industrial Ethernet Switch
HIRSCHMANN 943824-002 SPIDER 5TX Industrial Ethernet Switch -
 HIRSCHMANN RS30-0802O6O6SDAEHC09.1.00 Managed Industrial Switch
HIRSCHMANN RS30-0802O6O6SDAEHC09.1.00 Managed Industrial Switch -
 HIRSCHMANN RS20-0400M2M2TDAEHC04.0.01 Industrial Switch
HIRSCHMANN RS20-0400M2M2TDAEHC04.0.01 Industrial Switch -
 HIRSCHMANN BRS20-0600Z6Z6-STCZ99HHSES Industrial Switch
HIRSCHMANN BRS20-0600Z6Z6-STCZ99HHSES Industrial Switch -
 HIRSCHMANN MACH104-20TX-FR-L3P Industrial Ethernet Switch
HIRSCHMANN MACH104-20TX-FR-L3P Industrial Ethernet Switch -
 HIRSCHMANN RS40-0009CCCCEDBPHH06.0.01 Industrial Switch
HIRSCHMANN RS40-0009CCCCEDBPHH06.0.01 Industrial Switch -
 HIRSCHMANN RS2-3TX/2FX EEC Industrial Ethernet Switch
HIRSCHMANN RS2-3TX/2FX EEC Industrial Ethernet Switch -
 Hirschmann MACH 1020/1030 Fast/Gigabit Rack Mount Switches
Hirschmann MACH 1020/1030 Fast/Gigabit Rack Mount Switches -
HIRSCHMANN RS20-0800M2M2SDAPHC09.0.14 Industrial Switch
-
 HIRSCHMANN RS20-1600T1T1SDAEHC09.0.04 Industrial Switch
HIRSCHMANN RS20-1600T1T1SDAEHC09.0.04 Industrial Switch -
 HIRSCHMANN RSB20-0800T1T1EAABHH Industrial Switch
HIRSCHMANN RSB20-0800T1T1EAABHH Industrial Switch -
 HIRSCHMANN MACH4002-48+4G-L3E Industrial Backbone Switch
HIRSCHMANN MACH4002-48+4G-L3E Industrial Backbone Switch -
 HIRSCHMANN RS20-0400S2T1SDAE Industrial Managed Switch
HIRSCHMANN RS20-0400S2T1SDAE Industrial Managed Switch -
HIRSCHMANN RS20-0800S2T1SDAUHC Industrial Switch
-
 HIRSCHMANN RS20-2400S4S4SDAEHC09.0.14 industrial switch
HIRSCHMANN RS20-2400S4S4SDAEHC09.0.14 industrial switch -
 HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch
HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch -
HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch
-
 HIRSCHMANN RS40-0009CCCCSDAEHH09.0.14 switch
HIRSCHMANN RS40-0009CCCCSDAEHH09.0.14 switch -
 Hirschmann RS20-1600T1T1SDAUHC Management-type Ethernet Switch
Hirschmann RS20-1600T1T1SDAUHC Management-type Ethernet Switch -
 Hirschmann M1-8SFP Switche
Hirschmann M1-8SFP Switche -
Hirschmann Industrial Ethernet Ruggedized Switch MACH1000 Family
-
 Basler Electric, Solid State Protective Relay, BE1-60
Basler Electric, Solid State Protective Relay, BE1-60 -
BASLER ELECTRIC SR4A-2B15B3A Static Voltage Regulator
-
.png) BASLER ELECTRIC EXCITER DIODE MONITOR EDM-200
BASLER ELECTRIC EXCITER DIODE MONITOR EDM-200 -
.png) BASLER ELECTRIC DECS125-15-B2C5 DIGITAL EXCITATION CONTROL SYSTEM V 2.0.9
BASLER ELECTRIC DECS125-15-B2C5 DIGITAL EXCITATION CONTROL SYSTEM V 2.0.9 -
 BASLER ELECTRIC BE1-851 OVERCURRENT PROTECTION RELAY MECHANISM
BASLER ELECTRIC BE1-851 OVERCURRENT PROTECTION RELAY MECHANISM -
 Basler Electric BE1-51A / BE151A
Basler Electric BE1-51A / BE151A -
 Basler Electric BE1-40Q Loss of Excitation Relay
Basler Electric BE1-40Q Loss of Excitation Relay -
 Basler Electric BE1-87G Variable Percentage Differential Relay
Basler Electric BE1-87G Variable Percentage Differential Relay -
 Basler Electric BE1-11 Protection System I5A3M2P2N0EA00
Basler Electric BE1-11 Protection System I5A3M2P2N0EA00 -
 BASLER ELECTRIC DECS-200-1C Digital Excitation Control System
BASLER ELECTRIC DECS-200-1C Digital Excitation Control System -
 Basler Electric / Kohler BE1-11g Generator Protection Relay G5A3M2J2N0E000
Basler Electric / Kohler BE1-11g Generator Protection Relay G5A3M2J2N0E000 -
BASLER ELECTRIC DECS125-15 DIGITAL EXCITATION CONTROL SYSTEM
-
 BASLER ELECTRIC BE1-951 OverCurrent Protecton System
BASLER ELECTRIC BE1-951 OverCurrent Protecton System -
Basler Electric DECS-200-1L Digital Excitation Control System
-
 Basler Electric DGC-2020HD-5NS1DNSBA Digital Genset Controller -
Basler Electric DGC-2020HD-5NS1DNSBA Digital Genset Controller - -
 BASLER ELECTRIC BE1-81T1EE1WA0N1F / BE181T1EE1WA0N1F
BASLER ELECTRIC BE1-81T1EE1WA0N1F / BE181T1EE1WA0N1F -
 BASLER ELECTRIC BE1-25M1EA6PN5R1F / BE125M1EA6PN5R1F
BASLER ELECTRIC BE1-25M1EA6PN5R1F / BE125M1EA6PN5R1F -
 BASLER ELECTRIC DECS-250-LN1SN1N DIGITAL EXCITATION CONTROL SYSTEM
BASLER ELECTRIC DECS-250-LN1SN1N DIGITAL EXCITATION CONTROL SYSTEM -
Basler Electric DECS-250-CN2CN 1N Digital Excitation Control System Unit
-
 BASLER ELECTRIC DECS-300-C0N0 DIGITAL EXCITATION CONTROL SYSTEM
BASLER ELECTRIC DECS-300-C0N0 DIGITAL EXCITATION CONTROL SYSTEM -
 BASLER ELECTRIC BE1-87T-A1E-A1J-D0S1F / BE187TA1EA1JD0S1F
BASLER ELECTRIC BE1-87T-A1E-A1J-D0S1F / BE187TA1EA1JD0S1F -
BASLER ELECTRIC BE1-11-G6D1M0J2P0E000 Protection System
-
 BASLER ELECTRIC BE1-GPS100-E4N1H1N GENERATOR PROTECTION SYSTEM
BASLER ELECTRIC BE1-GPS100-E4N1H1N GENERATOR PROTECTION SYSTEM -
 Jaquet Relay card (Auxiliary module) FTV 3090 377Z-03985
Jaquet Relay card (Auxiliary module) FTV 3090 377Z-03985 -
 Jaquet Trip Chain Control card FTBU 3034 377Z-05030
Jaquet Trip Chain Control card FTBU 3034 377Z-05030 -
 Jaquet with input card -E04 FTFU 3024 -E04 377Z-05855
Jaquet with input card -E04 FTFU 3024 -E04 377Z-05855 -
 Jaquet with input card -E03 FTFU 3024- E03 377Z-03983
Jaquet with input card -E03 FTFU 3024- E03 377Z-03983 -
 Jaquet FTFU 3024- E02 377Z-03982 with input card -E02
Jaquet FTFU 3024- E02 377Z-03982 with input card -E02 -
 Jaquet FTFU 3024-E01 377Z-03981 with input card -E01
Jaquet FTFU 3024-E01 377Z-03981 with input card -E01 -
 Hirschmann RS20-2400T1T1SDAE Industrial Managed Ethernet Switch
Hirschmann RS20-2400T1T1SDAE Industrial Managed Ethernet Switch -
 Hirschmann BELDEN EAGLE30-04022O6TT999SCCV9HSE3F
Hirschmann BELDEN EAGLE30-04022O6TT999SCCV9HSE3F -
 Hirschmann MM3-2FXS2/2TX MICE Media Module
Hirschmann MM3-2FXS2/2TX MICE Media Module -
 Hirschmann RS20-1600M2M2SDAPHC08.0.05 Industrial Managed Switch
Hirschmann RS20-1600M2M2SDAPHC08.0.05 Industrial Managed Switch -
 Hirschmann OZD Profi 12M G12-1300 PRO Fieldbus Repeater
Hirschmann OZD Profi 12M G12-1300 PRO Fieldbus Repeater -
Hirschmann SPIDER 4TX/1FX-ST EEC Industrial Ethernet Switch
-
 Hirschmann MM2-2FXM3/2TX1 MICE Media Module
Hirschmann MM2-2FXM3/2TX1 MICE Media Module -
 Hirschmann RS20-2400M2M2SDAPHC09.0.14 Industrial Switch
Hirschmann RS20-2400M2M2SDAPHC09.0.14 Industrial Switch -
 Hirschmann RS20-0400M2M2SDAEHC07.1.05 OpenRail Switch
Hirschmann RS20-0400M2M2SDAEHC07.1.05 OpenRail Switch -
 Hirschmann OZD Profi 12M G12-EEC Fieldbus Repeater
Hirschmann OZD Profi 12M G12-EEC Fieldbus Repeater -
HIRSCHMANN MDA422-1/2-3.5c-23/46 sensor
-
Hirschmann RS30-2402T1T1SDAUHC Managed Industrial Switch


