
Summary of ABB Relion® 670 Protection Communication Network Setup and Application Guide
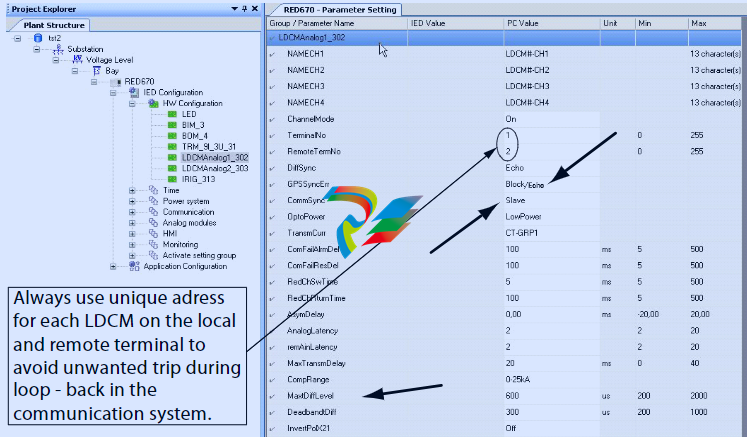
# Summary of ABB Relion® 670 Series RED670 Differential Protection Communication Network Setup and Application Guide ## I. Overview This document provides a setup and application guide for differential protection and binary signal transfer of RED670 in the ABB Relion® 670 series and other 670 series devices in telecommunication networks. It covers core contents such as synchronization methods, communication configuration, hardware modules, and fault troubleshooting, applicable to protection communication requirements of equipment like generators and lines in power systems. ## II. Core Application Scenarios and Synchronization Methods ### 1. Telecommunication Network Types and Synchronization Selection - **Symmetric/fixed route networks (Scenario I)**:Suitable for networks with fixed routes or symmetric bidirectional delays after switching. It adopts **Echo Timing** synchronization. By comparing internal device clocks and compensating with echo messages, a relative time deviation of ±1µs is achieved, supporting differential protection for up to 5 line ends . - **Unspecified route switching networks (Scenario II)**:Suitable for networks with uncertain route switching, relying on **GPS global time synchronization**. Global time is obtained through a built-in GPS receiver or IRIG-B input to ensure a clock deviation of <16µs, supporting protection reliability in complex network environments . ### 2. Key Synchronization Parameters - **Echo Timing**:Startup synchronization takes 15 seconds, with a maximum allowable communication interruption of 2 seconds (re-synchronization is required if exceeded). The protection function is blocked when clock deviation exceeds the set limit (±200-2000µs, configurable) . - **GPS Synchronization**:Cold start requires 15 minutes to search for satellites, and clock deviation can be reduced to 1µs within 1 hour. Echo Timing can be enabled as a backup after GPS interruption, and re-synchronization is required if the interruption exceeds 30 seconds . ## III. Echo Timing Function ### 1. Core Role It continuously monitors clock deviations between devices and sends echo messages at 40ms intervals to compensate for asymmetric communication delays, ensuring time synchronization accuracy for differential protection . ### 2. Asymmetric Delay Detection and Handling - **Detection Method**:Use a disturbance recorder to compare the time difference of zero-crossing points between local and remote currents to determine whether the communication system has fixed or fluctuating asymmetric delays . - **Compensation Mechanism**:Fixed asymmetric delays can be compensated by setting the `AsymDelay` parameter; fluctuating delays require switching to GPS synchronization . - **Cumulative Deviation Protection**:Monitor the accumulation of multiple small deviations (below `MaxtDiffLevel`), and block protection if exceeding 4 times to avoid maloperation . ## IV. GPS Synchronization Configuration ### 1. Startup and Calibration - **Cold Start**:The GPS antenna requires a clear view, initializes after searching for satellites (at least 4) within 15 minutes, and achieves ±1µs accuracy within 1 hour . - **Clock Synchronization**:Hardware and software clocks operate independently. During GPS synchronization, adjustment is performed in "fast/slow" modes: fast mode is suitable for rapid recovery after GPS interruption, and slow mode avoids clock jumps affecting protection . ### 2. Interruption Handling - `GPSSyncErr` is activated when GPS deviation >16µs, which can be set to block protection or switch to Echo Timing backup . - Supports redundant route monitoring; Echo Timing can continue operating if the delay after route switching is within the set range . ## V. Digital Signal Communication Configuration ### 1. Core Module: Line Data Communication Module (LDCM) - **Function**:Implements 64 kbit/s analog (current sampling) and binary signal transmission, supporting up to 4 communication channels . - **Types**:Divided into analog (CRM) and binary (CRB) modules. CRM is used for current transmission in differential protection, and CRB is used for up to 192 binary signals (e.g., control, alarm signals) . ### 2. Key Configurations - **Analog Signals**:Configure CT current sampling transmission via the PCM600 tool, supporting current summation or differential transmission for single-end dual CTs (e.g., 1.5 breaker wiring) . - **Binary Signals**:Map virtual inputs (SMBI) and outputs (SMBO) via the Signal Matrix Tool (SMT), supporting real-time transmission of 8 input/output channels . - **Redundant Channels**:Main and backup channels must have the same configuration; redundant channels automatically inherit main channel settings, with switchover delay configurable (5-500ms) to ensure seamless switching during communication interruptions . ## VI. Communication Interfaces and Network Settings ### 1. Main Interface Types | Interface Type | Protocol Standard | Application Scenario | Key Parameters | |----------------------|-------------------|----------------------------|--------------------------------------------------------------------------------| | Fiber Optic Interface | IEEE C37.94 | Long-distance, anti-interference | Multimode fiber (50/125µm, 2-3km), single-mode fiber (9/125µm, 70-110km), optical power budget 9-26dB | | Galvanic Interface | X.21 | Short-distance, leased lines | Rate 64 kbit/s, maximum cable length 100m, supporting balanced transmission | ### 2. PDH/SDH System Settings - **PDH System**:Based on 64 kbit/s channels, clock synchronization (master-slave mode) must be ensured, with maximum delay <40ms and jitter <±100µs . - **SDH System**:Based on 2 Mbit/s G.703 E1 interface, supporting structured/unstructured transmission, clock deviation <±50ppm, and buffer delay <250µs . ## VII. Fault Troubleshooting and Monitoring ### 1. Status Monitoring - **HMI Information**:Displays communication delay, number of received/transmitted messages, error codes (e.g., COMFAIL, CRCERROR), supporting real-time diagnosis of communication quality . - **Transceiver Indicators**:21-216/21-219 transceivers indicate faults via LEDs (LA for local alarm, RA for remote alarm), such as fiber signal loss and clock anomalies . ### 2. Fault Detection Methods - **Loop-back Test**:Sequentially test LDCM modules, transceivers, multiplexers, etc., through fiber or electrical loop-back to verify communication link integrity . - **Key Indicators**:Normal receive/transmit rate should reach 100%, Bit Error Rate (BER) <10⁻⁹ under normal conditions and <10⁻⁶ under disturbance . ## VIII. Key Parameters and Configuration Points ### 1. Core Parameter Settings | Parameter Category | Key Parameters | Range/Default Value | Role | |-----------------------|----------------------|------------------------------|-----------------------------------------------| | Synchronization Parameters | `MaxtDiffLevel` | 200-2000µs (default 600µs) | Maximum clock deviation threshold; protection blocks when exceeded | | Communication Parameters | `MaxTransmDelay` | 0-40ms (default 20ms) | Maximum transmission delay; protection blocks when exceeded | | Redundancy Parameters | `RedChSwTime` | 5-500ms (default 5ms) | Main-standby channel switchover delay | ### 2. Configuration Notes - Terminal numbers (`TerminalNo`) must be unique (0-255) to avoid address conflicts causing maloperation . - Fiber connections must be crossed (local Tx to remote Rx), and optical power must be within the budget (3dB margin reserved) . - Grounding must be reliable: transceivers and multiplexers share a common ground to avoid signal interference from ground loops . ## IX. Appendices and References - **Communication Requirement Specifications**:Must meet indicators such as BER, clock deviation, and delay (e.g., BER <10⁻⁸, maximum delay 40ms) . - **Related Documents**:Including operation manuals, technical reference manuals, configuration cases, etc., with the latest versions available on the ABB official website . This document provides comprehensive guidance for the reliable operation of RED670 and 670 series devices in complex telecommunication networks through clear synchronization mechanisms, communication configurations, and fault troubleshooting methods, serving as a reference for engineering design, commissioning, and maintenance personnel.
-
 OMRON C200PC-ISA02-DRM-E PLC ISA bus compatible board card
OMRON C200PC-ISA02-DRM-E PLC ISA bus compatible board card -
 OMRON C500-CT012 PLC
OMRON C500-CT012 PLC -
 OMRON C500-NC103-E PLC
OMRON C500-NC103-E PLC -
 OMRON C500-NC222-E PLC
OMRON C500-NC222-E PLC -
 OMRON C500-PRW05-V1 PLC
OMRON C500-PRW05-V1 PLC -
 OMRON C500-PRW06 PROGRAMMABLE CONTROLLER
OMRON C500-PRW06 PROGRAMMABLE CONTROLLER -
 OMRON C500-PS223-E 3G2A5-PS223-E PLC SYSMAC PROGRAMMABLE CONTROLLER
OMRON C500-PS223-E 3G2A5-PS223-E PLC SYSMAC PROGRAMMABLE CONTROLLER -
 OMRON C500-TU001 3G2A5-TU001 PLC PLC
OMRON C500-TU001 3G2A5-TU001 PLC PLC -
 OMRON C60H-C1DR-DE-V1 Programmable Controllers
OMRON C60H-C1DR-DE-V1 Programmable Controllers -
 OMRON C60H-C5DR-DE-V1 Programmable Controllers
OMRON C60H-C5DR-DE-V1 Programmable Controllers -
 OMRON C60H-C6DR-DE-V1 Programmable Controllers
OMRON C60H-C6DR-DE-V1 Programmable Controllers -
 OMRON CJ1G-CPU44H CPU module
OMRON CJ1G-CPU44H CPU module -
 OMRON CJ1G-CPU45H PLC
OMRON CJ1G-CPU45H PLC -
 OMRON CJ1M-CPU13-ETN V4.0 PLC PLC
OMRON CJ1M-CPU13-ETN V4.0 PLC PLC -
 OMRON CJ1W-AD041-V1 Analog input uni
OMRON CJ1W-AD041-V1 Analog input uni -
 OMRON CJ1W-CORT21 PLC module
OMRON CJ1W-CORT21 PLC module -
 OMRON CJ1W-IDP01 Input unit
OMRON CJ1W-IDP01 Input unit -
 OMRON CJ1W-MCH71 - MECHATROLINK-II
OMRON CJ1W-MCH71 - MECHATROLINK-II -
 OMRON CJ1W-MD261 Digital I/O
OMRON CJ1W-MD261 Digital I/O -
 OMRON CJ1W-NC413 Position control unit
OMRON CJ1W-NC413 Position control unit -
 OMRON CJ1W-NCF71 Position Control Units
OMRON CJ1W-NCF71 Position Control Units -
 OMRON CJ1W-PTS51 Process Simulation I/O Module
OMRON CJ1W-PTS51 Process Simulation I/O Module -
 OMRON CJ1W-PTS52 Process Simulation I/O Module
OMRON CJ1W-PTS52 Process Simulation I/O Module -
 OMRON CJ1W-SCU21-V1 PLC
OMRON CJ1W-SCU21-V1 PLC -
 Omron CJ1W-SCU22 Serial Communication Unit
Omron CJ1W-SCU22 Serial Communication Unit -
 OMRON CJ1W-TC001 CJ Series Temperature Control Unit
OMRON CJ1W-TC001 CJ Series Temperature Control Unit -
 Omron CK3W-AX1515N Motion Controller
Omron CK3W-AX1515N Motion Controller -
 Omron CP1E-N60DR-D Compact PLC CPU
Omron CP1E-N60DR-D Compact PLC CPU -
 OMRON CP1E-NA20DT1-D PLC PLC
OMRON CP1E-NA20DT1-D PLC PLC -
 OMRON CP1H-X40DT-D plc PLC
OMRON CP1H-X40DT-D plc PLC -
 OMRON CPM2C-S110C-DRT Interface module
OMRON CPM2C-S110C-DRT Interface module -
 OMRON CQM1-AD041 PLC
OMRON CQM1-AD041 PLC -
 SAACKE F‑GDSA‑1 / F‑GDSA‑2 Feuerungsautomaten
SAACKE F‑GDSA‑1 / F‑GDSA‑2 Feuerungsautomaten -
 SAACKE F-GDSA 143303 Controller SHIPS UPS
SAACKE F-GDSA 143303 Controller SHIPS UPS -
 ICS Triplex T8270 Trusted 24 Vdc FanAssembly
ICS Triplex T8270 Trusted 24 Vdc FanAssembly -
 SCHNEIDER M522220000 SA SM_DO16R 16 DIGITAL OUTPUTS MODULE
SCHNEIDER M522220000 SA SM_DO16R 16 DIGITAL OUTPUTS MODULE -
 LENZ EPL10200-W EPZ-10203 CANPT010W3E
LENZ EPL10200-W EPZ-10203 CANPT010W3E -
 OMRON CQM1H-ADB21 PLC
OMRON CQM1H-ADB21 PLC -
OMRON CQM1H-CPU61 PLC
-
 OMRON CQM1H-MAB42 PLC
OMRON CQM1H-MAB42 PLC -
 OMRON CQM1-TC102 CQM1-TC101 PLC
OMRON CQM1-TC102 CQM1-TC101 PLC -
 OMRON CS1G-CPU44-EV1 PLC
OMRON CS1G-CPU44-EV1 PLC -
 OMRON CS1G-CPU44H CPU
OMRON CS1G-CPU44H CPU -
OMRON CS1H-CPU63-EV1 PLC
-
 OMRON CS1H-CPU66-V1 PLC
OMRON CS1H-CPU66-V1 PLC -
 OMRON CS1W-CLK13 PLC communication module
OMRON CS1W-CLK13 PLC communication module -
OMRON CS1W-EIP21 PLC
-
 OMRON CS1W-MAD44 PLC PLC
OMRON CS1W-MAD44 PLC PLC -
 OMRON CS1W-SCU31-V1 CVM1-BC103 PLC
OMRON CS1W-SCU31-V1 CVM1-BC103 PLC -
 Omron CVM1-CPU21-V2 CPU Unit
Omron CVM1-CPU21-V2 CPU Unit -
 OMRON F150-C10E-2 Vision Controller
OMRON F150-C10E-2 Vision Controller -
 OMRON F150-C15E-3 Vision Controller
OMRON F150-C15E-3 Vision Controller -
 OMRON F160-C15E VISION MATE CONTROLLER
OMRON F160-C15E VISION MATE CONTROLLER -
 OMRON F500-C10-ETN F500-C15-ETN Vision Sensor
OMRON F500-C10-ETN F500-C15-ETN Vision Sensor -
 OMRON F500-VS F500-S1
OMRON F500-VS F500-S1 -
 OMRON FH-3050 FH Vision Controller
OMRON FH-3050 FH Vision Controller -
 Omron FQ2-S25050F PLC Smart Camera
Omron FQ2-S25050F PLC Smart Camera -
 Omron FQM1-MMA22 Motion Module
Omron FQM1-MMA22 Motion Module -
 OMRON GRT1-TS2P Temperature Module
OMRON GRT1-TS2P Temperature Module -
 OMRON H8PR-24 Cam Positioner
OMRON H8PR-24 Cam Positioner -
 OMRON IDSC-C1DR-A-E Controller
OMRON IDSC-C1DR-A-E Controller -
 OMRON K3HB-HTA-DRT1 Temperature Panel Meter
OMRON K3HB-HTA-DRT1 Temperature Panel Meter -
 Omron KM-N1-FLK Power Detector
Omron KM-N1-FLK Power Detector -
 OMRON CJ1G-CPU43H CPU
OMRON CJ1G-CPU43H CPU -
 OMRON NA5-7W001S-V1 NA5-9W001B-V1 NA5-12W101B-V1 Graphic panel
OMRON NA5-7W001S-V1 NA5-9W001B-V1 NA5-12W101B-V1 Graphic panel -
 OMRON NA5-9W001B-V1 Graphic panel
OMRON NA5-9W001B-V1 Graphic panel -
 OMRON NB10W-TW01B INTERACTIVE DISPLAY
OMRON NB10W-TW01B INTERACTIVE DISPLAY -
 OMRON NB7W-TW01B +CP1L-EL20DR-D Complete Power Panel
OMRON NB7W-TW01B +CP1L-EL20DR-D Complete Power Panel -
 OMRON NB7W-TX01B INTERACTIVE DISPLAY PLC
OMRON NB7W-TX01B INTERACTIVE DISPLAY PLC -
 Omron NE1A-SCPU02 Network Controller
Omron NE1A-SCPU02 Network Controller -
 OMRON NA5-7W001B-V1 NA5-7W001S-V1 NA5-9W001B-V1 NA5-12W101B-V1 touch screen
OMRON NA5-7W001B-V1 NA5-7W001S-V1 NA5-9W001B-V1 NA5-12W101B-V1 touch screen -
 Omron NS5-SQ00B-V2 NS5-SQ00-V2 NS5-SQ01-V2 NS5-SQ01B-V2 touch display panel
Omron NS5-SQ00B-V2 NS5-SQ00-V2 NS5-SQ01-V2 NS5-SQ01B-V2 touch display panel -
 Omron NJ301-1100 Programmable Logic Controller
Omron NJ301-1100 Programmable Logic Controller -
 OMRON NJ501-1300 CUP Unit Programmable Controller
OMRON NJ501-1300 CUP Unit Programmable Controller -
 Omron NS12-TS01B-V2 Interactive Display
Omron NS12-TS01B-V2 Interactive Display -
 OMRON NSJW-ETN21 ETHERNET HMI
OMRON NSJW-ETN21 ETHERNET HMI -
 OMRON NT10S-SF121 PLC
OMRON NT10S-SF121 PLC -
 OMRON NT20S-ST121-EV3 Touch Screen
OMRON NT20S-ST121-EV3 Touch Screen -
 Omron NX1P2-1140DT-BA Programmable Controller
Omron NX1P2-1140DT-BA Programmable Controller -
 OMRON 3G3MV-P10CDT3-E RS422/485 INVERTER BOARD
OMRON 3G3MV-P10CDT3-E RS422/485 INVERTER BOARD -
 Omron C500-ID219 3G2A5-ID219 System Microprocessor
Omron C500-ID219 3G2A5-ID219 System Microprocessor -
 Omron PLC B7AM-8B16
Omron PLC B7AM-8B16 -
 OMRON PLC Module CJ1W-AD081-V1
OMRON PLC Module CJ1W-AD081-V1 -
 OMRON R88D-HS10 PLC
OMRON R88D-HS10 PLC -
OMRON R88D-HT10 plc
-
 OMRON R88D-KN01H-ML2 Servos G5-series
OMRON R88D-KN01H-ML2 Servos G5-series -
 OMRON R88M-H10030-B plc
OMRON R88M-H10030-B plc -
 OMRON R88S-H306G plc PLC
OMRON R88S-H306G plc PLC -
 Omron Relay G9SX-GS226-T15-RT
Omron Relay G9SX-GS226-T15-RT -
 Omron S8AS-24006N S8AS Smart Power Supply FNIP
Omron S8AS-24006N S8AS Smart Power Supply FNIP -
 Omron Safety Input Unit NX-SIH400
Omron Safety Input Unit NX-SIH400 -
 OMRON SYSMAC SCY-P1 Sequential Controller
OMRON SYSMAC SCY-P1 Sequential Controller -
OMRON SYSMAC SCY-P0 13E Sequential Controller
-
 OMRON NS8-TV00B-V2 NS8-TV00-V2 NS8-TV00B-ECV2 NS8-TV00-ECV2 touch display Panel
OMRON NS8-TV00B-V2 NS8-TV00-V2 NS8-TV00B-ECV2 NS8-TV00-ECV2 touch display Panel -
 Omron V680-CA5D02-V2 Programmable Controller
Omron V680-CA5D02-V2 Programmable Controller -
 OMRON SGDH-04AE-OY Servo Drive
OMRON SGDH-04AE-OY Servo Drive -
OMRON SGDH-10DE-OY Servo Drive
-
 OMRON SGDS-02A12A PLC + SGMAS-C2ACA21
OMRON SGDS-02A12A PLC + SGMAS-C2ACA21 -
 OMRON SGMPH-04AAA61D-OY Servo Motor
OMRON SGMPH-04AAA61D-OY Servo Motor -
 Omron ZFV-CA40 Smart Sensor Amp Unit 24VDC 0.8A
Omron ZFV-CA40 Smart Sensor Amp Unit 24VDC 0.8A -
OMRON ZFV-NX1 CFP0260 ZFV-A20 VISION CONTROL PANEL
-
 OMRON ZFX-C15 SMART SENSOR AMP UNIT, Vision Sensor LCD
OMRON ZFX-C15 SMART SENSOR AMP UNIT, Vision Sensor LCD -
 OMRON ZFX-C20/25-CD SMART SENSOR AMP UNIT, Vision Sensor LCD
OMRON ZFX-C20/25-CD SMART SENSOR AMP UNIT, Vision Sensor LCD -
 OMRON-DIGITAL TEMPERATURE CONTROLLER E5AC-CX4A5M-014 r
OMRON-DIGITAL TEMPERATURE CONTROLLER E5AC-CX4A5M-014 r -
 ABB PFVL141V-2.0MN is an industrial-grade, rectangular roll force load cell
ABB PFVL141V-2.0MN is an industrial-grade, rectangular roll force load cell -
 ABB PFVL141V-1.6MN is an industrial-grade, rectangular roll force load cell
ABB PFVL141V-1.6MN is an industrial-grade, rectangular roll force load cell -
ABB PFVL141V-1.25MN high-performance, rectangular roll force load cell
-
 ABB PFVL141V-1.0MN high-precision, heavy-duty rectangular load cell
ABB PFVL141V-1.0MN high-precision, heavy-duty rectangular load cell -
 ABB PFVL141V-0.8MN high-precision, heavy-duty rectangular load cell
ABB PFVL141V-0.8MN high-precision, heavy-duty rectangular load cell -
 ABB PFVL141V-0.63MN high-precision, heavy-duty rectangular load cell
ABB PFVL141V-0.63MN high-precision, heavy-duty rectangular load cell -
 GE 151X1202YE08PP08 Panel of the case / Structural component
GE 151X1202YE08PP08 Panel of the case / Structural component -
 GE 151X1212HB01MG02 Integrated LCI Controller (Old Model)
GE 151X1212HB01MG02 Integrated LCI Controller (Old Model) -
 GE 151X1212GC01PC02 LCI Static Startup Controller
GE 151X1212GC01PC02 LCI Static Startup Controller -
 GE 151X1235FD01PK01 High-speed Digital Input Interface Board
GE 151X1235FD01PK01 High-speed Digital Input Interface Board -
 GE 151X1215DK01PC01 Signal Processing / Amplification Board
GE 151X1215DK01PC01 Signal Processing / Amplification Board -
 GE 151X1238WP99BK01 6-pulse LCI power conversion module
GE 151X1238WP99BK01 6-pulse LCI power conversion module -
 GE 151X1225DF01PC03RA - Power Conversion / Drive Regulation Board
GE 151X1225DF01PC03RA - Power Conversion / Drive Regulation Board -
 GE 151X1225DE03PC01 Drive Control Board (Terminal Control)
GE 151X1225DE03PC01 Drive Control Board (Terminal Control) -
 GE 151X1215GD01SA21 Gate Driver Board
GE 151X1215GD01SA21 Gate Driver Board -
 GE 151X1235BC11WK01 - Network Management Industrial Switch (10/100M)
GE 151X1235BC11WK01 - Network Management Industrial Switch (10/100M) -
 GE 151X1235BC01SA41 Enhanced 10-port switch (redundant)
GE 151X1235BC01SA41 Enhanced 10-port switch (redundant) -
GE 151X1235BC01SA01 10 Industrial Ethernet Switches
-
 GE 151X1235DC85PC08 High-speed Digital Input Card (32DI)
GE 151X1235DC85PC08 High-speed Digital Input Card (32DI) -
 GE 151X1233DB01SA01R4 Wind turbine pitch control I/O blue box
GE 151X1233DB01SA01R4 Wind turbine pitch control I/O blue box -
 GE 151X1235DB01SA01 16DI+16DO I/O Panel
GE 151X1235DB01SA01 16DI+16DO I/O Panel -
 ABB 3BUS213621-001 SBC Assembly
ABB 3BUS213621-001 SBC Assembly -
 ABB 3BUS212310-002 WEIGHT xP V2 DILUTION DRIVE MODULE
ABB 3BUS212310-002 WEIGHT xP V2 DILUTION DRIVE MODULE -
 ABB U3BUS212310-001 Weight xPV2 Slice Drive Module
ABB U3BUS212310-001 Weight xPV2 Slice Drive Module


