
rolls-royce User Manual Rolls-Royce Helicon X3 P&T Control System
Controller.)

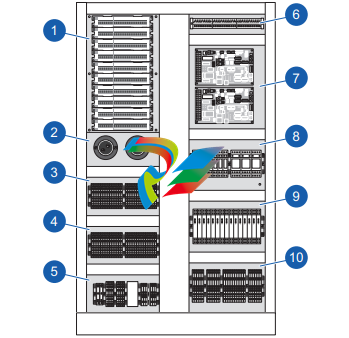
1. Rolls-Royce Marine Controller (Normal)
2. Rolls-Royce Marine Controller (Backup)
3. I/O modules
4. Power distribution
5. Network switches and terminals
6. Signal isolation amplifiers (optional)
7. Power Distribution
8. Main power supply (AC) / fuses
9. Backup power supply (DC) / fuses
3.7 I/O Cabinet
The I/O cabinet is often located in the thruster room near sensors and actuators. This
cabinet distributes signals to the different propulsion/thruster units. There is one I/O unit
per propeller/thruster.
The I/O cabinet sends signals to the actuators on the propellers/thrusters and receives
signals from the sensors. There is CAN bus communication between each I/O and
controller cabinet.
Normal Control
The output from the pitch controller is computed on the basis of the input signals from
pitch lever and the actuator position feedback.
Lever and feedback signals are scaled and checked against adjustable limits, with
corresponding alarm for exceeding the normal range. The levers have one set of
adjustments (minimum, zero and maximum) for each manoeuvre station. Multiple sets
of feedback adjustments (minimum, zero and maximum) are available for various
engine power take-outs.
In combined mode the lever signal is modified in a Combinator program, see chapter
Pitch and RPM Combinatory (combined Control).
4.1.2 Backup Control
The Backup Control system consists of closed loop control identical to the Normal
Control system. The Backup Control is a separate system, and is independent of the
Normal Control system. A system failure in the Normal Control system will
automatically switch to and engage the Backup Control.
Lever order signals and feedback are monitored and verified against adjustable alarm
limits. If the signals exceed the limits this will release an alarm to the alarm plant and
both visual and audible system failure alarm will be actuated at the manoeuvre stations.
4.1.3 Backup Control Operation
If a failure occurs on important parts of the Normal Control for the Pitch, Azimuth or
RPM Control function, the control will automatically be switched over to the Backup
Control system. A system failure audible and visible alarm will be activated on each of
the control panels.
The thruster control will continue to follow the lever in command and transfer is done
by using the common in command buttons. The command can be transferred between
all bridge position and the bridge control levers will continue to work as in normal
control.
A failure that occurs on important parts of the Backup Control for the Pitch, Azimuth or
RPM Control function will not affect the Normal Control system. If a system failure
occurs on the Backup Control an audible and visible alarm will be activated on each of
the control panels.
4.1.4 Backup Control Limitations
The Backup Control system has only interface to the control levers. The Backup Control
system does not have interface to External Control systems like Dynamic positioning
systems, Joysticks or Autopilots.
No pitch reduction or load function are included in the Backup system.
When operating using the backup system, the operator must be careful not to overload
the engine or the propeller system.
4.1.5 Local Control
If both the Remote Control system and the Backup Control should fail it is possible to
operate the propeller pitch locally from the pitch control valve.
4.1.6 Pitch Indication
The Pitch Indication system is independent of the Normal Pitch Control system by
means of separate transmitters and electronic circuits. The pitch indicators are connected
in series and are driven from the Backup Control system.
4.1.7 Pitch Order Scaling
The system may need to reduce the pitch order for different reasons. The pitch reduction
can either be activated from a digital or anlogue input signal.
To reserve engine power to heavy consumers as alternators, fire pumps, etc., it may be
necessary to reduce the available propeller output power. This is normally done by
means of a fixed propeller pitch reduction.
If the drive motor is a diesel engine the system is prepared to handle a fuel limiter
contact, from the RPM governor (i.e. high scavange air pressure). If the contact is closed
the pitch order will stop increasing to a higher value, only decrease of pitch order against
zero is possible.
For azimuth thrusters, a pitch reduction will be activated if the azimuth order is changed
faster then the thruster azimuth servo can follow.
4.2 Thruster Azimuth Control
The azimuth control function is to obtain the correct thruster azimuth position in
accordance to the control lever order. Valve controlled hydraulic motors or frequency
controlled electro motors perform the positioning of the thruster azimuth.
Detailed information regarding the hydraulic system or motor data is available in the
Thruster Instruction manual.
Note: Test point angle signals are ranged +/- 100%, representing +/- 180 degrees.
Some test points are named with degrees, displaying the angle in degrees
-
 HIRSCHMANN MSM20-M2M2M2M2SY9HH9E Ethernet media modul
HIRSCHMANN MSM20-M2M2M2M2SY9HH9E Ethernet media modul -
 HIRSCHMANN SPIDER-PL-20-05T1999999TWVHHHH Industrial Ethernet Rail Switch
HIRSCHMANN SPIDER-PL-20-05T1999999TWVHHHH Industrial Ethernet Rail Switch -
 Hirschmann SPIDER-PL-20-07T1M2M299TWVHHHH Industrial ETHERNET Rail Switch
Hirschmann SPIDER-PL-20-07T1M2M299TWVHHHH Industrial ETHERNET Rail Switch -
.png) Hirschmann (Belden) RS20-1600M2M2SDAEHC09.1.00 DIN-rail managed industrial Fast Ethernet switch
Hirschmann (Belden) RS20-1600M2M2SDAEHC09.1.00 DIN-rail managed industrial Fast Ethernet switch -
 Hirschmann (Belden) RS30-1602O6O6TDAPHC09.1.00 DIN-rail managed industrial Ethernet switch
Hirschmann (Belden) RS30-1602O6O6TDAPHC09.1.00 DIN-rail managed industrial Ethernet switch -
 Hirschmann (Belden) RS30-2402O6T1SDAPHH09.0.13 DIN-rail industrial Ethernet switch
Hirschmann (Belden) RS30-2402O6T1SDAPHH09.0.13 DIN-rail industrial Ethernet switch -
Hirschmann (Belden) SPIDER-PL-20-04T1S29999TY9HHHH Ethernet DIN-rail switch
-
 HIRSCHMANN RS20-1600T1T1SDAUHX Switch
HIRSCHMANN RS20-1600T1T1SDAUHX Switch -
 HIRSCHMANN BRS42-0012OOOO-SPCZ99HHSES industrial switch
HIRSCHMANN BRS42-0012OOOO-SPCZ99HHSES industrial switch -
 Hirschmann RS20-0800S2S2TDHPHH09.0.14 Fast Ethernet DIN rail switch.
Hirschmann RS20-0800S2S2TDHPHH09.0.14 Fast Ethernet DIN rail switch. -
 HIRSCHMANN MM20-Z6Z6M2M2SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-Z6Z6M2M2SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-Z6Z6T1T1SAHH hot-swappable hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-Z6Z6T1T1SAHH hot-swappable hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-P9P9T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-P9P9T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M4T1T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-M4T1T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M4M4T1T1SAHH Hybrid Fast Ethernet Media Module
HIRSCHMANN MM20-M4M4T1T1SAHH Hybrid Fast Ethernet Media Module -
 HIRSCHMANN MM20-M2M2M2M2SZHH Ethernet media module
HIRSCHMANN MM20-M2M2M2M2SZHH Ethernet media module -
HIRSCHMANN MM20-M2M2M2M2SAHH Ethernet media module
-
 HIRSCHMANN MM20-T1T1T1T1EBH 4-port Fast Ethernet Copper Cable Media Module
HIRSCHMANN MM20-T1T1T1T1EBH 4-port Fast Ethernet Copper Cable Media Module -
HIRSCHMANN MM20-T1T1T1T1SAHH 4-port Fast Ethernet Copper Cable Media Module
-
HIRSCHMANN MM20-T1T1T1T1SAHH 4-port Fast Ethernet Copper Cable Media Module
-
 HIRSCHMANN MM20-Z6Z6EBH Hot-swappable fast Ethernet media module
HIRSCHMANN MM20-Z6Z6EBH Hot-swappable fast Ethernet media module -
 HIRSCHMANN MM20-Z6Z6SAHH Ethernet media module
HIRSCHMANN MM20-Z6Z6SAHH Ethernet media module -
HIRSCHMANN MM20-Z6Z6Z6Z6EBH Industrial Media Module
-
 MSM40-T1T1T1TZ9HH9E99.9.99 HIRSCHMANN Switch
MSM40-T1T1T1TZ9HH9E99.9.99 HIRSCHMANN Switch -
 HIRSCHMANN MS20-0800SAAEHC / MS20-0800SAAEHC0 8-port modular Layer 2 management Ethernet switch
HIRSCHMANN MS20-0800SAAEHC / MS20-0800SAAEHC0 8-port modular Layer 2 management Ethernet switch -
 Hirschmann RSPM20-4T14T1SZ9HHS9 Switch RSPM20-4T14T1SZ9HHS9
Hirschmann RSPM20-4T14T1SZ9HHS9 Switch RSPM20-4T14T1SZ9HHS9 -
 HIRSCHMANN RS20-1600M2M2SDAEHH09.1. RS20/30/40 Managed Switch configurator
HIRSCHMANN RS20-1600M2M2SDAEHH09.1. RS20/30/40 Managed Switch configurator -
HIRSCHMANN RS20-1600M2M2SDAEHX09.0.00 Ethernet switch
-
 HIRSCHMANN BELDEN SPIDER-PL-20-07T1M2M299TY9HHHH / SPIDERPL2007T1M2M299TY9HHHH
HIRSCHMANN BELDEN SPIDER-PL-20-07T1M2M299TY9HHHH / SPIDERPL2007T1M2M299TY9HHHH -
HIRSCHMANN MM3-1FXS2/3TX1 Switching Board Module
-
 HIRSCHMANN RSPE30-24044O7T99-ECCP999HHSE2A08.1.00 Industrial-grade fanless management-type Ethernet switch
HIRSCHMANN RSPE30-24044O7T99-ECCP999HHSE2A08.1.00 Industrial-grade fanless management-type Ethernet switch -
 HIRSCHMANN RS30-1602OOZZSDAEHC09.1.00 DIN-rail-mounted managed Layer 2 Ethernet switch
HIRSCHMANN RS30-1602OOZZSDAEHC09.1.00 DIN-rail-mounted managed Layer 2 Ethernet switch -
 HIRSCHMANN MACH104-20TX-F Managed 24-port Full Gigabit 19" Switch
HIRSCHMANN MACH104-20TX-F Managed 24-port Full Gigabit 19" Switch -
 HIRSCHMANN Switch RS20-0800M4M4SDAE
HIRSCHMANN Switch RS20-0800M4M4SDAE -
Hirschmann RS30-1602O6O6SDAEHH09.1. Management-type Ethernet switch
-
 Hirschmann RS30-1602OOZZSDAEHC09.0.10 Open rack-style Ethernet switch
Hirschmann RS30-1602OOZZSDAEHC09.0.10 Open rack-style Ethernet switch -
 HIRSCHMANN RSPE30-24044O7T99-SCCV999HHSI2SXX.X.XX High-Availability Seamless Redundancy
HIRSCHMANN RSPE30-24044O7T99-SCCV999HHSI2SXX.X.XX High-Availability Seamless Redundancy -
HIRSCHMANN RSPE30-24044O7T99-SCCZ999HHSE2A DIN-rail Ethernet switch
-
HIRSCHMANN MM2-4TX1-EEC switch
-
HIRSCHMANN MSM40-T1T1T1T1TZ9HH9E99.9.99 Module
-
 HIRSCHMANN RS20 Rail Switch RS20-0400S4T1SDAEHC07.1.01
HIRSCHMANN RS20 Rail Switch RS20-0400S4T1SDAEHC07.1.01 -
 HIRSCHMANN M4-FAST8-SFP Fast Ethernet media module
HIRSCHMANN M4-FAST8-SFP Fast Ethernet media module -
 HIRSCHMANN RS20-0400M2T1SDAP Managed Fast-Ethernet-Switch
HIRSCHMANN RS20-0400M2T1SDAP Managed Fast-Ethernet-Switch -
 HIRSCHMANN BELDEN SPIDER II 8TX/1FX EEC Industrial Ethernet Rail Switch
HIRSCHMANN BELDEN SPIDER II 8TX/1FX EEC Industrial Ethernet Rail Switch -
HIRSCHMANN MM3-2FXS2/2TX1
-
 HIRSCHMANN RS2-4TX/1FX EEC Industrial Ethernet Rail Switch
HIRSCHMANN RS2-4TX/1FX EEC Industrial Ethernet Rail Switch -
 RS30-0802O6O6SDAEHC09.0.10 HIRSCHMANN Switch
RS30-0802O6O6SDAEHC09.0.10 HIRSCHMANN Switch -
 HIRSCHMANN m4-8TP-RJ45 Ethernet Media Module
HIRSCHMANN m4-8TP-RJ45 Ethernet Media Module -
 HIRSCHMANN MSP30-24040SCZ9URHHE3A switch
HIRSCHMANN MSP30-24040SCZ9URHHE3A switch -
 Hirschmann rack MS30-1602SAAPHC
Hirschmann rack MS30-1602SAAPHC -
 HIRSCHMANN RS2-FX/FX Industrial Switch Module
HIRSCHMANN RS2-FX/FX Industrial Switch Module -
Rs1txfx - Hirschmann - Rs1-Tx/Fx Rail Switch
-
RS20-0800S2S2SDAEHC09.1.00 HIRSCHMANN Commutator
-
 Hirschmann EAGLE20 TX/TX Industrial Security Router
Hirschmann EAGLE20 TX/TX Industrial Security Router -
 Hirschmann SPIDER-SL-20-04T1S29999SY9HHHH Industrial Switch
Hirschmann SPIDER-SL-20-04T1S29999SY9HHHH Industrial Switch -
 HIRSCHMANN MAR1040-4C4C4C4C9999SMMHRHHXX.X. Gigabit Ethernet Switch configurator
HIRSCHMANN MAR1040-4C4C4C4C9999SMMHRHHXX.X. Gigabit Ethernet Switch configurator -
 Hirschmann MAR1040 Industrial Switch
Hirschmann MAR1040 Industrial Switch -
 HIRSCHMANN BELDEN RS30-1602O6O6SDAE
HIRSCHMANN BELDEN RS30-1602O6O6SDAE -
Hirschmann RS20-1600M2M2SDAUHC Ethernet DIN rail switch
-
 HIRSCHMANN OCTOPUS 24M industrial switch
HIRSCHMANN OCTOPUS 24M industrial switch -
 HIRSCHMANN RS20-1600T1T1SDAE Management-type Ethernet switch
HIRSCHMANN RS20-1600T1T1SDAE Management-type Ethernet switch -
 HIRSCHMANN RS20-1600T1T1SDAUHH industrial switch
HIRSCHMANN RS20-1600T1T1SDAUHH industrial switch -
HIRSCHMANN RS20-0800M2M2SDAPHC09.0.04 switch
-
 Hirschmann MR 8-03 24V DC Industrial Modular Bridge/Router
Hirschmann MR 8-03 24V DC Industrial Modular Bridge/Router -
 HIRSCHMANN RS20-0400M2T1SDAPHC08.0.01 Managed Switch
HIRSCHMANN RS20-0400M2T1SDAPHC08.0.01 Managed Switch -
 MACH1130 Hirschmann Industrial Switch
MACH1130 Hirschmann Industrial Switch -
 HIRSCHMANN 943824-002 SPIDER 5TX Industrial Ethernet Switch
HIRSCHMANN 943824-002 SPIDER 5TX Industrial Ethernet Switch -
 HIRSCHMANN RS30-0802O6O6SDAEHC09.1.00 Managed Industrial Switch
HIRSCHMANN RS30-0802O6O6SDAEHC09.1.00 Managed Industrial Switch -
 HIRSCHMANN RS20-0400M2M2TDAEHC04.0.01 Industrial Switch
HIRSCHMANN RS20-0400M2M2TDAEHC04.0.01 Industrial Switch -
 HIRSCHMANN BRS20-0600Z6Z6-STCZ99HHSES Industrial Switch
HIRSCHMANN BRS20-0600Z6Z6-STCZ99HHSES Industrial Switch -
 HIRSCHMANN MACH104-20TX-FR-L3P Industrial Ethernet Switch
HIRSCHMANN MACH104-20TX-FR-L3P Industrial Ethernet Switch -
 HIRSCHMANN RS40-0009CCCCEDBPHH06.0.01 Industrial Switch
HIRSCHMANN RS40-0009CCCCEDBPHH06.0.01 Industrial Switch -
 HIRSCHMANN RS2-3TX/2FX EEC Industrial Ethernet Switch
HIRSCHMANN RS2-3TX/2FX EEC Industrial Ethernet Switch -
 Hirschmann MACH 1020/1030 Fast/Gigabit Rack Mount Switches
Hirschmann MACH 1020/1030 Fast/Gigabit Rack Mount Switches -
HIRSCHMANN RS20-0800M2M2SDAPHC09.0.14 Industrial Switch
-
 HIRSCHMANN RS20-1600T1T1SDAEHC09.0.04 Industrial Switch
HIRSCHMANN RS20-1600T1T1SDAEHC09.0.04 Industrial Switch -
 HIRSCHMANN RSB20-0800T1T1EAABHH Industrial Switch
HIRSCHMANN RSB20-0800T1T1EAABHH Industrial Switch -
 HIRSCHMANN MACH4002-48+4G-L3E Industrial Backbone Switch
HIRSCHMANN MACH4002-48+4G-L3E Industrial Backbone Switch -
 HIRSCHMANN RS20-0400S2T1SDAE Industrial Managed Switch
HIRSCHMANN RS20-0400S2T1SDAE Industrial Managed Switch -
HIRSCHMANN RS20-0800S2T1SDAUHC Industrial Switch
-
 HIRSCHMANN RS20-2400S4S4SDAEHC09.0.14 industrial switch
HIRSCHMANN RS20-2400S4S4SDAEHC09.0.14 industrial switch -
 HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch
HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch -
HIRSCHMANN OS20-001200T5T5T5- TBBZ999HHNE3S 08.1.00 industrial switch
-
 HIRSCHMANN RS40-0009CCCCSDAEHH09.0.14 switch
HIRSCHMANN RS40-0009CCCCSDAEHH09.0.14 switch -
 Hirschmann RS20-1600T1T1SDAUHC Management-type Ethernet Switch
Hirschmann RS20-1600T1T1SDAUHC Management-type Ethernet Switch -
 Hirschmann M1-8SFP Switche
Hirschmann M1-8SFP Switche -
Hirschmann Industrial Ethernet Ruggedized Switch MACH1000 Family
-
 Basler Electric, Solid State Protective Relay, BE1-60
Basler Electric, Solid State Protective Relay, BE1-60 -
BASLER ELECTRIC SR4A-2B15B3A Static Voltage Regulator
-
.png) BASLER ELECTRIC EXCITER DIODE MONITOR EDM-200
BASLER ELECTRIC EXCITER DIODE MONITOR EDM-200 -
.png) BASLER ELECTRIC DECS125-15-B2C5 DIGITAL EXCITATION CONTROL SYSTEM V 2.0.9
BASLER ELECTRIC DECS125-15-B2C5 DIGITAL EXCITATION CONTROL SYSTEM V 2.0.9 -
 BASLER ELECTRIC BE1-851 OVERCURRENT PROTECTION RELAY MECHANISM
BASLER ELECTRIC BE1-851 OVERCURRENT PROTECTION RELAY MECHANISM -
 Basler Electric BE1-51A / BE151A
Basler Electric BE1-51A / BE151A -
 Basler Electric BE1-40Q Loss of Excitation Relay
Basler Electric BE1-40Q Loss of Excitation Relay -
 Basler Electric BE1-87G Variable Percentage Differential Relay
Basler Electric BE1-87G Variable Percentage Differential Relay -
 Basler Electric BE1-11 Protection System I5A3M2P2N0EA00
Basler Electric BE1-11 Protection System I5A3M2P2N0EA00 -
 BASLER ELECTRIC DECS-200-1C Digital Excitation Control System
BASLER ELECTRIC DECS-200-1C Digital Excitation Control System -
 Basler Electric / Kohler BE1-11g Generator Protection Relay G5A3M2J2N0E000
Basler Electric / Kohler BE1-11g Generator Protection Relay G5A3M2J2N0E000 -
BASLER ELECTRIC DECS125-15 DIGITAL EXCITATION CONTROL SYSTEM
-
 BASLER ELECTRIC BE1-951 OverCurrent Protecton System
BASLER ELECTRIC BE1-951 OverCurrent Protecton System -
Basler Electric DECS-200-1L Digital Excitation Control System
-
 Basler Electric DGC-2020HD-5NS1DNSBA Digital Genset Controller -
Basler Electric DGC-2020HD-5NS1DNSBA Digital Genset Controller - -
 BASLER ELECTRIC BE1-81T1EE1WA0N1F / BE181T1EE1WA0N1F
BASLER ELECTRIC BE1-81T1EE1WA0N1F / BE181T1EE1WA0N1F -
 BASLER ELECTRIC BE1-25M1EA6PN5R1F / BE125M1EA6PN5R1F
BASLER ELECTRIC BE1-25M1EA6PN5R1F / BE125M1EA6PN5R1F -
 BASLER ELECTRIC DECS-250-LN1SN1N DIGITAL EXCITATION CONTROL SYSTEM
BASLER ELECTRIC DECS-250-LN1SN1N DIGITAL EXCITATION CONTROL SYSTEM -
Basler Electric DECS-250-CN2CN 1N Digital Excitation Control System Unit
-
 BASLER ELECTRIC DECS-300-C0N0 DIGITAL EXCITATION CONTROL SYSTEM
BASLER ELECTRIC DECS-300-C0N0 DIGITAL EXCITATION CONTROL SYSTEM -
 BASLER ELECTRIC BE1-87T-A1E-A1J-D0S1F / BE187TA1EA1JD0S1F
BASLER ELECTRIC BE1-87T-A1E-A1J-D0S1F / BE187TA1EA1JD0S1F -
BASLER ELECTRIC BE1-11-G6D1M0J2P0E000 Protection System
-
 BASLER ELECTRIC BE1-GPS100-E4N1H1N GENERATOR PROTECTION SYSTEM
BASLER ELECTRIC BE1-GPS100-E4N1H1N GENERATOR PROTECTION SYSTEM -
 Jaquet Relay card (Auxiliary module) FTV 3090 377Z-03985
Jaquet Relay card (Auxiliary module) FTV 3090 377Z-03985 -
 Jaquet Trip Chain Control card FTBU 3034 377Z-05030
Jaquet Trip Chain Control card FTBU 3034 377Z-05030 -
 Jaquet with input card -E04 FTFU 3024 -E04 377Z-05855
Jaquet with input card -E04 FTFU 3024 -E04 377Z-05855 -
 Jaquet with input card -E03 FTFU 3024- E03 377Z-03983
Jaquet with input card -E03 FTFU 3024- E03 377Z-03983 -
 Jaquet FTFU 3024- E02 377Z-03982 with input card -E02
Jaquet FTFU 3024- E02 377Z-03982 with input card -E02 -
 Jaquet FTFU 3024-E01 377Z-03981 with input card -E01
Jaquet FTFU 3024-E01 377Z-03981 with input card -E01 -
 Hirschmann RS20-2400T1T1SDAE Industrial Managed Ethernet Switch
Hirschmann RS20-2400T1T1SDAE Industrial Managed Ethernet Switch -
 Hirschmann BELDEN EAGLE30-04022O6TT999SCCV9HSE3F
Hirschmann BELDEN EAGLE30-04022O6TT999SCCV9HSE3F -
 Hirschmann MM3-2FXS2/2TX MICE Media Module
Hirschmann MM3-2FXS2/2TX MICE Media Module -
 Hirschmann RS20-1600M2M2SDAPHC08.0.05 Industrial Managed Switch
Hirschmann RS20-1600M2M2SDAPHC08.0.05 Industrial Managed Switch -
 Hirschmann OZD Profi 12M G12-1300 PRO Fieldbus Repeater
Hirschmann OZD Profi 12M G12-1300 PRO Fieldbus Repeater -
Hirschmann SPIDER 4TX/1FX-ST EEC Industrial Ethernet Switch
-
 Hirschmann MM2-2FXM3/2TX1 MICE Media Module
Hirschmann MM2-2FXM3/2TX1 MICE Media Module -
 Hirschmann RS20-2400M2M2SDAPHC09.0.14 Industrial Switch
Hirschmann RS20-2400M2M2SDAPHC09.0.14 Industrial Switch -
 Hirschmann RS20-0400M2M2SDAEHC07.1.05 OpenRail Switch
Hirschmann RS20-0400M2M2SDAEHC07.1.05 OpenRail Switch -
 Hirschmann OZD Profi 12M G12-EEC Fieldbus Repeater
Hirschmann OZD Profi 12M G12-EEC Fieldbus Repeater -
HIRSCHMANN MDA422-1/2-3.5c-23/46 sensor
-
Hirschmann RS30-2402T1T1SDAUHC Managed Industrial Switch


