
ABBDCV 700 thyristor panelsfor 6-/ and 12-pulse DC drive systems in Drive-MNS-cabinets 22 to 5150/10300 A 10 to 4900/9400 kW
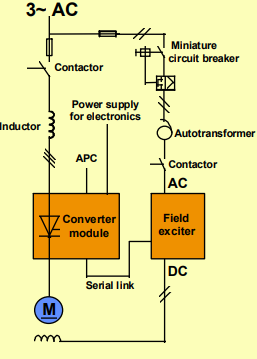
Control Configuration The control system provides a flexible and simple method of controlling different drive configurations. The configurations comprise the converter and its software, Application Controller, Engineering and Maintenance tools and different communication links to other automation systems. The control system includes an Application Controller (APC) and a Digital Drive Controller (DDC) with well defined functions and interface. The Application Controller (APC), common for both AC and DC drives, is a single board controller with all the software and hardware facilities needed to handle the application specific functions. The Digital Drive Controller (DDC) is not programmable but various functions and operating modes can be selected by a fixed number of parameters, which are set from the APC level. The motor control programs are located in the DDC, which is controlled by either a torque or a speed reference provided by the APC.
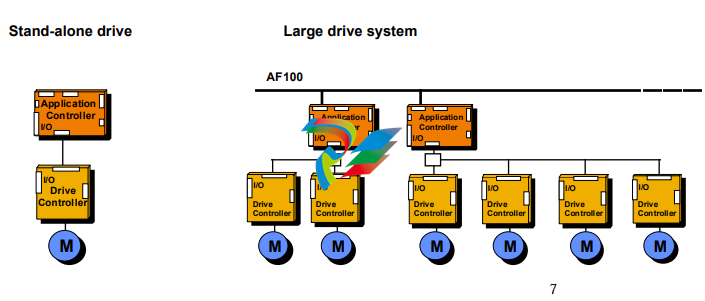
Stand-alone drive A single drive has one Digital Drive Controller DDC connected to the Application controller APC. Small drive system In small systems, one APC is connected from 1 up to 4 Digital Drive Controllers. The small drive configuration can also be used in master/slave applications. Large drive system Large systems are built by interconnecting application controllers through a communication bus, for example AF100. Common control functions can be distributed to separate nodes. Even very complex systems can be configured by using the same system design concept and its common building blocks, resulting in great savings in, for example, spare parts.
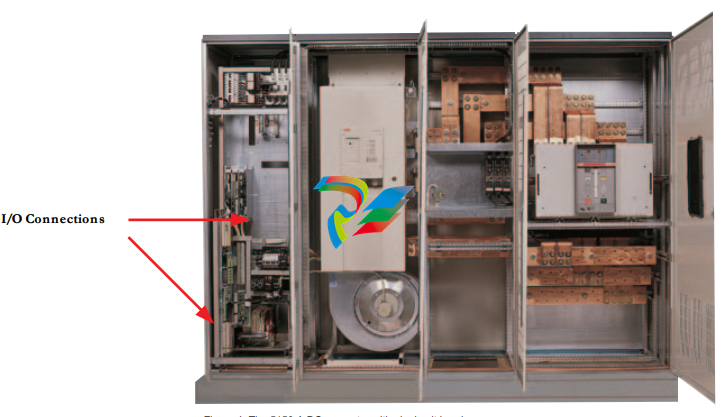
The I/O connections of the DCV 700 are in the Application Controller (APC) and in the Digital Drive Controller (DDC). The Application Controller APC includes: • 4 digital inputs • 2 digital outputs • 2 analogue inputs • 1 voltage reference output The I/O connections in the Drive Controller DDC are used for safety and other drive specific functions like emergency stop and motor temperature measurement: • 3 digital inputs • 4 digital outputs • 5 analogue inputs • 2 analogue outputs • 1 pulse encoder input • 1 emergency stop input • 1 emergency stop output • 1 current source • 1 voltage reference output • 1 actual armature current output Optional I/O boards are available to provide tailored solutions for the most demanding applications. The quantity of I/Os can be increased by using extended I/O board and speed measurement board. Extended / Remote I/O Board YPQ110A Connection to the APC can either be through parallel bus (extended) or through low speed serial bus (remote). • 8 digital inputs • 8 digital outputs • 4 analogue inputs • 2 analogue outputs • 3 voltage reference outputs Speed Measurement Board YPH107A The board can be used for accurate speed and position measurement. Connection to the APC is through the parallel bus. For positioning there is a 32 bit hardware counter. • 1 digital input for synchronisation • 1 pulse encoder input • 2 analogue outputs
Communication Various communication boards are available to provide communication links between the APC and overriding control systems.
AF100 Advant Fieldbus 100 is a high-speed serial bus, which is used for communication between APCs or between an APC and an overriding system such as ABB’s Advant Controller AC400-family. The bus administrator board CI626 (BA) is needed for controlling the bus when not using the Advant Controller AC450. The communication board YPK112A is used to connect the APC to the Advant Fieldbus 100.
UART Board YPK113A The UART board, YPK113A, is used to communicate with other overriding systems. Protocols for Siemens Simatic S5 and Allen Bradley DH are available together with SAMI protocol.
Technical Data Optional I/O Connections The technical data and dimensions are valid at the time of printing. We reserve the right to subsequent alterations. Extended/Remote I/O board YPQ110A
8 digital inputs Opto isolated inputs, control voltage 110 VAC/ 24 VDC. Hardware delay 2 ms. Digital filter time constants from 0.5 ms to 128 ms in 0.5 ms steps. Input impedance 3 kΩ for 24 VDC and 13 kΩ for 110 VAC. 8 digital outputs 6 relay outputs, normally open contacts. Max. voltage 230 VAC, max. current 2 A at 230 VAC, min. switching time 20 ms. 2 opto isolated transistor outputs. Max. voltage 60 V DC, max. current 100 mA, min. switching time 100 µs. 4 analogue inputs Differential inputs, resolution 12 bits+sign. Input ranges -10 to +10 V or -20 to +20 mA (0 to +10 V, 0 to +1 V and 0/4 to 20 mA by software scaling), input impedance is 400 kΩ. Accuracy ± 0.1 % at ± 10 V and ± 0.4 % at ± 1 V. Hardware filter time constant 5 ms. Digital filter time constants from 5 ms to 32 s in 1 ms steps. 2 analogue outputs Output voltage -10 to +10 V, output current -10 to +10 mA. Resolution 12 bits+sign, accuracy ± 0.1 %. 3 voltage reference +10 V voltage reference, accuracy ± 1 mV. outputs Max. load current 10 mA. -10 V voltage reference, accuracy ± 5 mV. Max. load current 10 mA. 5 mA current reference, accuracy ± 0.05 mA. Max. load resistance 1 kΩ. Extended, connection through parallel bus: max. 4 boards. Remote, connection through low speed serial bus: max. 8 nodes. Speed measurement board YPH107A 1 digital input for Control voltage 24 V AC/DC or 110 V AC/DC. synchronisation Input impedance 3 kΩ at 24 V and 13 kΩ at 110 V. Hardware delay 1 ms or 10 ms, software adjustable. 1 pulse encoder input 3 opto isolated channels (A, B and Z), differential or single ended tachometers. ± 13 mA current input or ± 24 V voltage input. Max. input frequency 300 kHz. 2 analogue outputs Output voltage ± 10 V, output current ± 10 mA. Resolution 12 bits, accuracy ± 1 %.
-
 SEL SEL-3610 Port Server
SEL SEL-3610 Port Server -
 SEL SEL-2730U Unmanaged 24-Port Ethernet Switch
SEL SEL-2730U Unmanaged 24-Port Ethernet Switch -
 SEL SEL-2725 Five-Port Ethernet Switch
SEL SEL-2725 Five-Port Ethernet Switch -
 SEL SEL-2744 Ethernet Switch
SEL SEL-2744 Ethernet Switch -
 SEL SEL-2743 Ethernet Switch
SEL SEL-2743 Ethernet Switch -
 SEL SEL-2742 Ethernet Switch
SEL SEL-2742 Ethernet Switch -
 SEL SEL-2741 Ethernet Switch
SEL SEL-2741 Ethernet Switch -
 SEL SEL-2731 Ethernet Switch
SEL SEL-2731 Ethernet Switch -
 SEL SEL-2902 RJ45 to DB-9 Adapter Panel
SEL SEL-2902 RJ45 to DB-9 Adapter Panel -
 SEL SEL-3390S8 Serial Adapter Card
SEL SEL-3390S8 Serial Adapter Card -
 SEL SEL-3390E4 Network Adapter Card
SEL SEL-3390E4 Network Adapter Card -
 SEL SEL-3390T Time and Ethernet Adapter Card
SEL SEL-3390T Time and Ethernet Adapter Card -
 SEL SEL-3360 Computing Platform
SEL SEL-3360 Computing Platform -
 SEL SEL-3355 Computing Platform
SEL SEL-3355 Computing Platform -
 SEL SEL-5703 Synchrowave Monitoring
SEL SEL-5703 Synchrowave Monitoring -
 SEL SEL-5705 Synchrowave Reports
SEL SEL-5705 Synchrowave Reports -
 SEL Metering Software Solutions
SEL Metering Software Solutions -
 SEL SEL-T35 Time-Domain Power Monitor
SEL SEL-T35 Time-Domain Power Monitor -
 SEL SEL-735 Power Quality and Revenue Meter
SEL SEL-735 Power Quality and Revenue Meter -
 SEL SEL-TWFL Dual Traveling-Wave Fault Locator and 12-Channel MHz Recorder
SEL SEL-TWFL Dual Traveling-Wave Fault Locator and 12-Channel MHz Recorder -
 SEL SEL-5035 acSELerator Diagram Builder Software
SEL SEL-5035 acSELerator Diagram Builder Software -
 SEL SEL-5033 acSELerator RTAC Software
SEL SEL-5033 acSELerator RTAC Software -
 SEL SEL-2411P Pump Automation Controller
SEL SEL-2411P Pump Automation Controller -
 SEL SEL-2411 Programmable Automation Controller
SEL SEL-2411 Programmable Automation Controller -
 SEL SEL-3560 Real-Time Automation Controller (RTAC)
SEL SEL-3560 Real-Time Automation Controller (RTAC) -
 SEL SEL-3555 Real-Time Automation Controller (RTAC)
SEL SEL-3555 Real-Time Automation Controller (RTAC) -
 SEL SEL-3350 Computing Platform
SEL SEL-3350 Computing Platform -
 SEL SEL-3530-4 Real-Time Automation Controller (RTAC)
SEL SEL-3530-4 Real-Time Automation Controller (RTAC) -
 SEL SEL-3505/3505-3 Real-Time Automation Controller (RTAC)
SEL SEL-3505/3505-3 Real-Time Automation Controller (RTAC) -
 SEL Real-Time Automation Controller (RTAC)
SEL Real-Time Automation Controller (RTAC) -
 SEL SEL-2414 Transformer Automation Controller (TAC)
SEL SEL-2414 Transformer Automation Controller (TAC) -
 SEL SEL-734B Advanced Monitoring and Control System
SEL SEL-734B Advanced Monitoring and Control System -
 SEL SEL-734W and LINAM WCS
SEL SEL-734W and LINAM WCS -
 SEL SEL-2431 Voltage Regulator Control
SEL SEL-2431 Voltage Regulator Control -
 SEL SEL-5601-2 Synchrowave Event Software
SEL SEL-5601-2 Synchrowave Event Software -
 SEL SEL-5032 acSELerator Architect Software
SEL SEL-5032 acSELerator Architect Software -
 SEL SEL-5030 acSELerator QuickSet Software
SEL SEL-5030 acSELerator QuickSet Software -
 SEL SEL-751A Feeder Protection Relay
SEL SEL-751A Feeder Protection Relay -
 SEL SEL-2440 DPAC Discrete Programmable Automation Controller
SEL SEL-2440 DPAC Discrete Programmable Automation Controller -
 SEL SEL-2240 Axion
SEL SEL-2240 Axion -
 SEL SEL-401 Protection, Automation, and Control Merging Unit
SEL SEL-401 Protection, Automation, and Control Merging Unit -
 SEL SEL-TMU TiDL Merging Unit
SEL SEL-TMU TiDL Merging Unit -
 SEL SEL-700BT Motor Bus Transfer Relay
SEL SEL-700BT Motor Bus Transfer Relay -
 SEL SEL-849 Motor Management Relay
SEL SEL-849 Motor Management Relay -
 SEL SEL-3790 Low-Voltage Divider Module
SEL SEL-3790 Low-Voltage Divider Module -
 SEL SEL-710-5 Motor Protection Relay
SEL SEL-710-5 Motor Protection Relay -
 SEL SEL-487V Capacitor Bank Protection, Automation, and Control System
SEL SEL-487V Capacitor Bank Protection, Automation, and Control System -
 SEL SEL-351RS Kestrel Single-Phase Recloser Control
SEL SEL-351RS Kestrel Single-Phase Recloser Control -
 SEL SEL-651RA Recloser Control
SEL SEL-651RA Recloser Control -
 SEL SEL-651R Advanced Recloser Control
SEL SEL-651R Advanced Recloser Control -
 SEL SEL-551C Overcurrent/Reclosing Relay
SEL SEL-551C Overcurrent/Reclosing Relay -
 SEL SEL-351S Protection System
SEL SEL-351S Protection System -
 SEL SEL-851 Feeder Protection Relay
SEL SEL-851 Feeder Protection Relay -
 SEL SEL-451 Protection, Automation, and Bay Control System
SEL SEL-451 Protection, Automation, and Bay Control System -
 SEL SEL-751 Feeder Protection Relay
SEL SEL-751 Feeder Protection Relay -
 SEL SEL-311C Transmission Protection System
SEL SEL-311C Transmission Protection System -
 SEL SEL-387L Line Current Differential Relay
SEL SEL-387L Line Current Differential Relay -
 SEL SEL-311L Line Current Differential Protection and Automation System
SEL SEL-311L Line Current Differential Protection and Automation System -
 SEL SEL-787L Line Current Differential Relay
SEL SEL-787L Line Current Differential Relay -
SEL SEL-421 Protection, Automation, and Control System
-
 SEL SEL-9L Line Relay
SEL SEL-9L Line Relay -
 SEL SEL-411L Advanced Line Differential Protection, Automation, and Control System
SEL SEL-411L Advanced Line Differential Protection, Automation, and Control System -
 SEL SEL-587Z High-Impedance Differential Relay
SEL SEL-587Z High-Impedance Differential Relay -
 SEL SEL-7251 Electromechanical Direct-Replacement Assemblies
SEL SEL-7251 Electromechanical Direct-Replacement Assemblies -
 SEL SEL-787Z High-Impedance Differential Relay and SEL-HZM High-Impedance Module
SEL SEL-787Z High-Impedance Differential Relay and SEL-HZM High-Impedance Module -
 SEL SEL-487B Bus Differential and Breaker Failure Relay
SEL SEL-487B Bus Differential and Breaker Failure Relay -
 SEL SEL-387 Current Differential and Overcurrent Relay
SEL SEL-387 Current Differential and Overcurrent Relay -
SEL SEL-387A Current Differential and Overcurrent Relay
-
 SEL SEL-2600 RTD Module
SEL SEL-2600 RTD Module -
 SEL SEL-387E Current Differential and Voltage Relay
SEL SEL-387E Current Differential and Voltage Relay -
 SEL SEL-787-2/-3/-4 Transformer Protection Relay
SEL SEL-787-2/-3/-4 Transformer Protection Relay -
 SEL SEL-487E Transformer Protection Relay
SEL SEL-487E Transformer Protection Relay -
 SEL SEL-2664S Stator Ground Protection Relay
SEL SEL-2664S Stator Ground Protection Relay -
 SEL SEL-300G Generator Relay
SEL SEL-300G Generator Relay -
 SEL SEL-700G Generator Protection Relay
SEL SEL-700G Generator Protection Relay -
SEL SEL-700G Generator Protection Relay
-
 SEL SEL-400G Advanced Generator Protection System
SEL SEL-400G Advanced Generator Protection System -
 SEL SEL-T400L Time-Domain Line Protection
SEL SEL-T400L Time-Domain Line Protection -
 SEL SEL-T401L Ultra-High-Speed Line Relay
SEL SEL-T401L Ultra-High-Speed Line Relay -
 ADLINK Multi-Function DAQ PCI-9222/9223
ADLINK Multi-Function DAQ PCI-9222/9223 -
 ADLINK PICMG Single Board Computers NuPRO-A40H
ADLINK PICMG Single Board Computers NuPRO-A40H -
ADLINK HSL-4XMO HSL-4XMO-TB-D103 HSL-4XMO-CD-N-006
-
 ADLINK industrial computer motherboard NuPRO-965DV
ADLINK industrial computer motherboard NuPRO-965DV -
 AADLINK PCI-7442 switch card Digital I/O
AADLINK PCI-7442 switch card Digital I/O -
 ADLINK PCI-7260 Digital I/O
ADLINK PCI-7260 Digital I/O -
 ADLINK PICMG Single Board Computers NuPRO-852
ADLINK PICMG Single Board Computers NuPRO-852 -
 ADlink 6U CompactPCI 2.0 Blades cPCI-6840
ADlink 6U CompactPCI 2.0 Blades cPCI-6840 -
 Adlink PICMG Single Board Computers NuPRO-935A
Adlink PICMG Single Board Computers NuPRO-935A -
 ADLINK ADLINK NuPRO-841 REV:1.0 PICMG Single Board Computers
ADLINK ADLINK NuPRO-841 REV:1.0 PICMG Single Board Computers -
ADLINK PCI-8254 / PCI-8258 DSP-based 4/8-axis Advanced Motion Controllers
-
 ADLINK NUPRO-780 PICMG Single Board Computers
ADLINK NUPRO-780 PICMG Single Board Computers -
 ADLINK USB-7230/7250 Isolated USB Digital I/O Modules
ADLINK USB-7230/7250 Isolated USB Digital I/O Modules -
 Adlink Technology 51-37111-0C1 cPCI-R8217 cPCI-R3700A PCB Interface Card
Adlink Technology 51-37111-0C1 cPCI-R8217 cPCI-R3700A PCB Interface Card -
 ADLINK DPAC-3020-11(G) Embedded PC Automation Controller
ADLINK DPAC-3020-11(G) Embedded PC Automation Controller -
 ADLINK NuPRO-840 PICMG 1.0 industrial Single Board
ADLINK NuPRO-840 PICMG 1.0 industrial Single Board -
 Adlink 6U CompactPCI 2.0 Blades cPCI-6965
Adlink 6U CompactPCI 2.0 Blades cPCI-6965 -
 ADLINK PCI-9114DG Multi-Function DAQ Card
ADLINK PCI-9114DG Multi-Function DAQ Card -
 Adlink NuPRO-E43 PICMG Single Board Computers
Adlink NuPRO-E43 PICMG Single Board Computers -
 Adlink PCI-7856 Distributed Motion Control
Adlink PCI-7856 Distributed Motion Control -
 ADLINK Mini-ITX Embedded Boards MI-965
ADLINK Mini-ITX Embedded Boards MI-965 -
 ADLINK NuPRO-E340 industrial control motherboard
ADLINK NuPRO-E340 industrial control motherboard -
 ADLINK NuPRO-595 Series Full-Size PICMG 1.0 SBC
ADLINK NuPRO-595 Series Full-Size PICMG 1.0 SBC -
 ADLINK PCIe-GIE64+ / PCIe-GIE62+ 4 / 2-CH PCI Express® Power over Ethernet Frame Grabbers
ADLINK PCIe-GIE64+ / PCIe-GIE62+ 4 / 2-CH PCI Express® Power over Ethernet Frame Grabbers -
 ADLINK CPCI-6910AM-M1G 6U Dual Core Xeon CompactPCI Universal SBC
ADLINK CPCI-6910AM-M1G 6U Dual Core Xeon CompactPCI Universal SBC -
 ADLINK/AMPRO CM-435-v2/CM-435 Extreme Rugged™ PC/104 Single Board Computer
ADLINK/AMPRO CM-435-v2/CM-435 Extreme Rugged™ PC/104 Single Board Computer -
 ADLINK Technology 51-37111-0C1 PCB Interface Card
ADLINK Technology 51-37111-0C1 PCB Interface Card -
 Adlink Centralized Motion Controllers PCI-8164
Adlink Centralized Motion Controllers PCI-8164 -
 ADLINK PCI-7230/33/34 32-CH Isolated DIO PCI Cardsrd
ADLINK PCI-7230/33/34 32-CH Isolated DIO PCI Cardsrd -
 ADLINK NUPRO-E320DV/NUPRO-E320 industrial control motherboard
ADLINK NUPRO-E320DV/NUPRO-E320 industrial control motherboard -
 Adlink PCI-8154 Advanced 4-axis Servo & Stepper Motion Controller
Adlink PCI-8154 Advanced 4-axis Servo & Stepper Motion Controller -
 Adlink cPCI-3534/3538-S Series 4/8-port Asynchronous Serial Communications Modules
Adlink cPCI-3534/3538-S Series 4/8-port Asynchronous Serial Communications Modules -
 ADLINK Adlink Digital I/O PCI-7396
ADLINK Adlink Digital I/O PCI-7396 -
 ADLINK 6U Rear Transition Modules cPCI-R6700 Series
ADLINK 6U Rear Transition Modules cPCI-R6700 Series -
 ADLINK cPCI-6700B Industrial Control Board
ADLINK cPCI-6700B Industrial Control Board -
ADLINK NuPRO-965/ NuPRO-965LV PICMG Single Board Computers
-
 ADLINK HSL-DI16DO16-M-NN 16-CH Discrete Input 16-CH Discrete Output Module
ADLINK HSL-DI16DO16-M-NN 16-CH Discrete Input 16-CH Discrete Output Module -
 Adlink cPCI-6770 6U CompactPCI 2.0 Blades
Adlink cPCI-6770 6U CompactPCI 2.0 Blades -
 ADLINK NuPRO-598 REV A1 INDUSTRIAL CONTROL MOTHERBOARD
ADLINK NuPRO-598 REV A1 INDUSTRIAL CONTROL MOTHERBOARD -
 ADLINK PCI-7200 PCI Motion Control Card Acquisition Card 51-12001-0C20
ADLINK PCI-7200 PCI Motion Control Card Acquisition Card 51-12001-0C20 -
 ADLINK TECHNOLOGY EOS-1200/M4G/SSD32G(G) Industrial Systems
ADLINK TECHNOLOGY EOS-1200/M4G/SSD32G(G) Industrial Systems -
 ADLINK Centralized Motion Controllers PCI-8134
ADLINK Centralized Motion Controllers PCI-8134 -
 ADLINK cPCI-HR6847E/M2G-1 COMPACT PCI BOARD
ADLINK cPCI-HR6847E/M2G-1 COMPACT PCI BOARD -
 ADLINK PXIE-8638 BUS EXPANSION MODULE
ADLINK PXIE-8638 BUS EXPANSION MODULE -
 ADLINK cPCI-6910 6U CompactPCI 2.0 Blades
ADLINK cPCI-6910 6U CompactPCI 2.0 Blades -
 Adlink NuPRO-E42 51-41808-0A30 Industrial Motherboard
Adlink NuPRO-E42 51-41808-0A30 Industrial Motherboard -
 ADLINK IH61-AA400-A4A1E (IMB-M40H) Industrial Motherboard
ADLINK IH61-AA400-A4A1E (IMB-M40H) Industrial Motherboard -
 ADLINK PCIe-GIE64+ GigE Vision Frame Grabber Card
ADLINK PCIe-GIE64+ GigE Vision Frame Grabber Card -
 ADLINK MXC-6322D(G) Industrial Fanless Computer working
ADLINK MXC-6322D(G) Industrial Fanless Computer working



