
ABBDistributed busbar protection REB500 including line and transformer protection Product Guide
REB500 system in a simple way.
Fig. 5 Bay unit
Central unit (500CU03)
The hardware structure is based on standard
racks and only a few different module types
for the central unit (see Fig. 4).
The modules actually installed in a particular
protection scheme depend on the size, complexity and functionality of the busbar system.
A parallel bus on a front-plate motherboard
establishes the interconnections between the
modules in a rack. The modules are inserted
from the rear.
The central unit is the system manager, i.e. it
configures the system, contains the busbar
replica, assigns bays within the system, manages the sets of operating parameters, acts as
process bus controller, assures synchronization of the system and controls communication with the station control system.
The variables for the busbar protection function are derived dynamically from the process
data provided by the bay units.
The process data are transferred to the central processor via a star coupler module. Up to
10 bay units can be connected to the first central processor and 10 to the others. Central
processors and star coupler modules are
added for protection systems that include
more than 10 bay units. In the case of more
than 30 bay units, additional casings are
required for accommodating the additional
central processors and star coupler modules
required.
All modules of the central unit have a plugand-play functionality in order to minimize
module configuration.
One or two binary I/O modules can be connected to a central processing unit.
The central unit comprises a local HMI with 20
programmable LEDs (Fig. 6), a TCP/IP port
for very fast HMI500 connection within the
local area network.


Distributed busbar protection REB500
including line and transformer protection
Page 9
Functionality Busbar protection
The protection algorithms are based on two
well-proven measuring principles which have
been applied successfully in earlier ABB lowimpedance busbar protection systems:
• a stabilized differential current measurement
• the determination of the phase relationship
between the feeder currents (phase comparison)
The algorithms process complex current vectors which are obtained by Fourier analysis
and only contain the fundamental frequency
component. Any DC component and harmonics are suppressed.
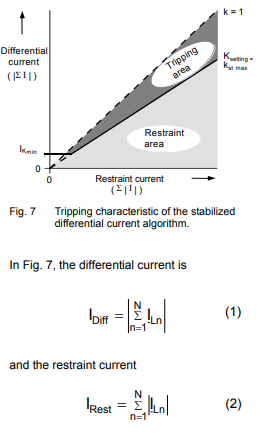
The first measuring principle uses a stabilized
differential current algorithm.
The currents are evaluated individually for
each of the phases and each section of busbar (protection zone).
where N is the number of feeders. The following two conditions have to be accomplished
for the detection of an internal fault:
where
kst stabilizing factor
kst max stabilization factor limit.
A typical value is kst max = 0.80
IK min differential current pick-up value
The above calculations and evaluations are
performed by the central unit.
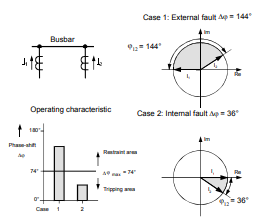
The second measuring principle determines
the direction of energy flow and involves comparing the phases of the currents of all the
feeders connected to a busbar section.
The fundamental frequency current phasors
1..n (5) are compared. In the case of an internal fault, all of the feeder currents have almost the same phase angle, while in normal
operation or during an external fault at least
one current is approximately 180° out of
phase with the others
The algorithm detects an internal fault when
the difference between the phase angles of all
the feeder currents lies within the tripping
angle of the phase comparator (see Fig. 8).
Distributed busbar protection REB500
including line and transformer protection
The task of processing the algorithms is
shared between the bay units and the central
processing unit. Each of the bay units continuously monitors the currents of its own fee-der,
preprocesses them accordingly and then filters the resulting data according to a Fourier
function. The analog data filtered in this way
are then transferred at regular intervals to the
central processing unit running the busbar
protection algorithms.
Depending on the phase-angle of the fault,
the tripping time varies at Idiff/Ikmin5 between 20 and 30 ms including the auxiliary
tripping relay.
Optionally, the tripping signal can be interlocked by a current or voltage release criteria
in the bay unit that enables tripping only when
a current above a certain minimum is flowing,
respectively the voltage is below a certain
value.
Breaker failure protection
The breaker failure functions in the bay units
monitor both phase currents and neutral current independently of the busbar protection.
They have two timers with individual settings.
Operation of the breaker failure function is
enabled either:
• internally by the busbar protection algorithm (and, if configured, also by the internal line protection, overcurrent or pole
discrepancy protection features) of the bay
level
• externally via a binary input, e.g. by the line
-
 SEL SEL-3610 Port Server
SEL SEL-3610 Port Server -
 SEL SEL-2730U Unmanaged 24-Port Ethernet Switch
SEL SEL-2730U Unmanaged 24-Port Ethernet Switch -
 SEL SEL-2725 Five-Port Ethernet Switch
SEL SEL-2725 Five-Port Ethernet Switch -
 SEL SEL-2744 Ethernet Switch
SEL SEL-2744 Ethernet Switch -
 SEL SEL-2743 Ethernet Switch
SEL SEL-2743 Ethernet Switch -
 SEL SEL-2742 Ethernet Switch
SEL SEL-2742 Ethernet Switch -
 SEL SEL-2741 Ethernet Switch
SEL SEL-2741 Ethernet Switch -
 SEL SEL-2731 Ethernet Switch
SEL SEL-2731 Ethernet Switch -
 SEL SEL-2902 RJ45 to DB-9 Adapter Panel
SEL SEL-2902 RJ45 to DB-9 Adapter Panel -
 SEL SEL-3390S8 Serial Adapter Card
SEL SEL-3390S8 Serial Adapter Card -
 SEL SEL-3390E4 Network Adapter Card
SEL SEL-3390E4 Network Adapter Card -
 SEL SEL-3390T Time and Ethernet Adapter Card
SEL SEL-3390T Time and Ethernet Adapter Card -
 SEL SEL-3360 Computing Platform
SEL SEL-3360 Computing Platform -
 SEL SEL-3355 Computing Platform
SEL SEL-3355 Computing Platform -
 SEL SEL-5703 Synchrowave Monitoring
SEL SEL-5703 Synchrowave Monitoring -
 SEL SEL-5705 Synchrowave Reports
SEL SEL-5705 Synchrowave Reports -
 SEL Metering Software Solutions
SEL Metering Software Solutions -
 SEL SEL-T35 Time-Domain Power Monitor
SEL SEL-T35 Time-Domain Power Monitor -
 SEL SEL-735 Power Quality and Revenue Meter
SEL SEL-735 Power Quality and Revenue Meter -
 SEL SEL-TWFL Dual Traveling-Wave Fault Locator and 12-Channel MHz Recorder
SEL SEL-TWFL Dual Traveling-Wave Fault Locator and 12-Channel MHz Recorder -
 SEL SEL-5035 acSELerator Diagram Builder Software
SEL SEL-5035 acSELerator Diagram Builder Software -
 SEL SEL-5033 acSELerator RTAC Software
SEL SEL-5033 acSELerator RTAC Software -
 SEL SEL-2411P Pump Automation Controller
SEL SEL-2411P Pump Automation Controller -
 SEL SEL-2411 Programmable Automation Controller
SEL SEL-2411 Programmable Automation Controller -
 SEL SEL-3560 Real-Time Automation Controller (RTAC)
SEL SEL-3560 Real-Time Automation Controller (RTAC) -
 SEL SEL-3555 Real-Time Automation Controller (RTAC)
SEL SEL-3555 Real-Time Automation Controller (RTAC) -
 SEL SEL-3350 Computing Platform
SEL SEL-3350 Computing Platform -
 SEL SEL-3530-4 Real-Time Automation Controller (RTAC)
SEL SEL-3530-4 Real-Time Automation Controller (RTAC) -
 SEL SEL-3505/3505-3 Real-Time Automation Controller (RTAC)
SEL SEL-3505/3505-3 Real-Time Automation Controller (RTAC) -
 SEL Real-Time Automation Controller (RTAC)
SEL Real-Time Automation Controller (RTAC) -
 SEL SEL-2414 Transformer Automation Controller (TAC)
SEL SEL-2414 Transformer Automation Controller (TAC) -
 SEL SEL-734B Advanced Monitoring and Control System
SEL SEL-734B Advanced Monitoring and Control System -
 SEL SEL-734W and LINAM WCS
SEL SEL-734W and LINAM WCS -
 SEL SEL-2431 Voltage Regulator Control
SEL SEL-2431 Voltage Regulator Control -
 SEL SEL-5601-2 Synchrowave Event Software
SEL SEL-5601-2 Synchrowave Event Software -
 SEL SEL-5032 acSELerator Architect Software
SEL SEL-5032 acSELerator Architect Software -
 SEL SEL-5030 acSELerator QuickSet Software
SEL SEL-5030 acSELerator QuickSet Software -
 SEL SEL-751A Feeder Protection Relay
SEL SEL-751A Feeder Protection Relay -
 SEL SEL-2440 DPAC Discrete Programmable Automation Controller
SEL SEL-2440 DPAC Discrete Programmable Automation Controller -
 SEL SEL-2240 Axion
SEL SEL-2240 Axion -
 SEL SEL-401 Protection, Automation, and Control Merging Unit
SEL SEL-401 Protection, Automation, and Control Merging Unit -
 SEL SEL-TMU TiDL Merging Unit
SEL SEL-TMU TiDL Merging Unit -
 SEL SEL-700BT Motor Bus Transfer Relay
SEL SEL-700BT Motor Bus Transfer Relay -
 SEL SEL-849 Motor Management Relay
SEL SEL-849 Motor Management Relay -
 SEL SEL-3790 Low-Voltage Divider Module
SEL SEL-3790 Low-Voltage Divider Module -
 SEL SEL-710-5 Motor Protection Relay
SEL SEL-710-5 Motor Protection Relay -
 SEL SEL-487V Capacitor Bank Protection, Automation, and Control System
SEL SEL-487V Capacitor Bank Protection, Automation, and Control System -
 SEL SEL-351RS Kestrel Single-Phase Recloser Control
SEL SEL-351RS Kestrel Single-Phase Recloser Control -
 SEL SEL-651RA Recloser Control
SEL SEL-651RA Recloser Control -
 SEL SEL-651R Advanced Recloser Control
SEL SEL-651R Advanced Recloser Control -
 SEL SEL-551C Overcurrent/Reclosing Relay
SEL SEL-551C Overcurrent/Reclosing Relay -
 SEL SEL-351S Protection System
SEL SEL-351S Protection System -
 SEL SEL-851 Feeder Protection Relay
SEL SEL-851 Feeder Protection Relay -
 SEL SEL-451 Protection, Automation, and Bay Control System
SEL SEL-451 Protection, Automation, and Bay Control System -
 SEL SEL-751 Feeder Protection Relay
SEL SEL-751 Feeder Protection Relay -
 SEL SEL-311C Transmission Protection System
SEL SEL-311C Transmission Protection System -
 SEL SEL-387L Line Current Differential Relay
SEL SEL-387L Line Current Differential Relay -
 SEL SEL-311L Line Current Differential Protection and Automation System
SEL SEL-311L Line Current Differential Protection and Automation System -
 SEL SEL-787L Line Current Differential Relay
SEL SEL-787L Line Current Differential Relay -
SEL SEL-421 Protection, Automation, and Control System
-
 SEL SEL-9L Line Relay
SEL SEL-9L Line Relay -
 SEL SEL-411L Advanced Line Differential Protection, Automation, and Control System
SEL SEL-411L Advanced Line Differential Protection, Automation, and Control System -
 SEL SEL-587Z High-Impedance Differential Relay
SEL SEL-587Z High-Impedance Differential Relay -
 SEL SEL-7251 Electromechanical Direct-Replacement Assemblies
SEL SEL-7251 Electromechanical Direct-Replacement Assemblies -
 SEL SEL-787Z High-Impedance Differential Relay and SEL-HZM High-Impedance Module
SEL SEL-787Z High-Impedance Differential Relay and SEL-HZM High-Impedance Module -
 SEL SEL-487B Bus Differential and Breaker Failure Relay
SEL SEL-487B Bus Differential and Breaker Failure Relay -
 SEL SEL-387 Current Differential and Overcurrent Relay
SEL SEL-387 Current Differential and Overcurrent Relay -
SEL SEL-387A Current Differential and Overcurrent Relay
-
 SEL SEL-2600 RTD Module
SEL SEL-2600 RTD Module -
 SEL SEL-387E Current Differential and Voltage Relay
SEL SEL-387E Current Differential and Voltage Relay -
 SEL SEL-787-2/-3/-4 Transformer Protection Relay
SEL SEL-787-2/-3/-4 Transformer Protection Relay -
 SEL SEL-487E Transformer Protection Relay
SEL SEL-487E Transformer Protection Relay -
 SEL SEL-2664S Stator Ground Protection Relay
SEL SEL-2664S Stator Ground Protection Relay -
 SEL SEL-300G Generator Relay
SEL SEL-300G Generator Relay -
 SEL SEL-700G Generator Protection Relay
SEL SEL-700G Generator Protection Relay -
SEL SEL-700G Generator Protection Relay
-
 SEL SEL-400G Advanced Generator Protection System
SEL SEL-400G Advanced Generator Protection System -
 SEL SEL-T400L Time-Domain Line Protection
SEL SEL-T400L Time-Domain Line Protection -
 SEL SEL-T401L Ultra-High-Speed Line Relay
SEL SEL-T401L Ultra-High-Speed Line Relay -
 ADLINK Multi-Function DAQ PCI-9222/9223
ADLINK Multi-Function DAQ PCI-9222/9223 -
 ADLINK PICMG Single Board Computers NuPRO-A40H
ADLINK PICMG Single Board Computers NuPRO-A40H -
ADLINK HSL-4XMO HSL-4XMO-TB-D103 HSL-4XMO-CD-N-006
-
 ADLINK industrial computer motherboard NuPRO-965DV
ADLINK industrial computer motherboard NuPRO-965DV -
 AADLINK PCI-7442 switch card Digital I/O
AADLINK PCI-7442 switch card Digital I/O -
 ADLINK PCI-7260 Digital I/O
ADLINK PCI-7260 Digital I/O -
 ADLINK PICMG Single Board Computers NuPRO-852
ADLINK PICMG Single Board Computers NuPRO-852 -
 ADlink 6U CompactPCI 2.0 Blades cPCI-6840
ADlink 6U CompactPCI 2.0 Blades cPCI-6840 -
 Adlink PICMG Single Board Computers NuPRO-935A
Adlink PICMG Single Board Computers NuPRO-935A -
 ADLINK ADLINK NuPRO-841 REV:1.0 PICMG Single Board Computers
ADLINK ADLINK NuPRO-841 REV:1.0 PICMG Single Board Computers -
ADLINK PCI-8254 / PCI-8258 DSP-based 4/8-axis Advanced Motion Controllers
-
 ADLINK NUPRO-780 PICMG Single Board Computers
ADLINK NUPRO-780 PICMG Single Board Computers -
 ADLINK USB-7230/7250 Isolated USB Digital I/O Modules
ADLINK USB-7230/7250 Isolated USB Digital I/O Modules -
 Adlink Technology 51-37111-0C1 cPCI-R8217 cPCI-R3700A PCB Interface Card
Adlink Technology 51-37111-0C1 cPCI-R8217 cPCI-R3700A PCB Interface Card -
 ADLINK DPAC-3020-11(G) Embedded PC Automation Controller
ADLINK DPAC-3020-11(G) Embedded PC Automation Controller -
 ADLINK NuPRO-840 PICMG 1.0 industrial Single Board
ADLINK NuPRO-840 PICMG 1.0 industrial Single Board -
 Adlink 6U CompactPCI 2.0 Blades cPCI-6965
Adlink 6U CompactPCI 2.0 Blades cPCI-6965 -
 ADLINK PCI-9114DG Multi-Function DAQ Card
ADLINK PCI-9114DG Multi-Function DAQ Card -
 Adlink NuPRO-E43 PICMG Single Board Computers
Adlink NuPRO-E43 PICMG Single Board Computers -
 Adlink PCI-7856 Distributed Motion Control
Adlink PCI-7856 Distributed Motion Control -
 ADLINK Mini-ITX Embedded Boards MI-965
ADLINK Mini-ITX Embedded Boards MI-965 -
 ADLINK NuPRO-E340 industrial control motherboard
ADLINK NuPRO-E340 industrial control motherboard -
 ADLINK NuPRO-595 Series Full-Size PICMG 1.0 SBC
ADLINK NuPRO-595 Series Full-Size PICMG 1.0 SBC -
 ADLINK PCIe-GIE64+ / PCIe-GIE62+ 4 / 2-CH PCI Express® Power over Ethernet Frame Grabbers
ADLINK PCIe-GIE64+ / PCIe-GIE62+ 4 / 2-CH PCI Express® Power over Ethernet Frame Grabbers -
 ADLINK CPCI-6910AM-M1G 6U Dual Core Xeon CompactPCI Universal SBC
ADLINK CPCI-6910AM-M1G 6U Dual Core Xeon CompactPCI Universal SBC -
 ADLINK/AMPRO CM-435-v2/CM-435 Extreme Rugged™ PC/104 Single Board Computer
ADLINK/AMPRO CM-435-v2/CM-435 Extreme Rugged™ PC/104 Single Board Computer -
 ADLINK Technology 51-37111-0C1 PCB Interface Card
ADLINK Technology 51-37111-0C1 PCB Interface Card -
 Adlink Centralized Motion Controllers PCI-8164
Adlink Centralized Motion Controllers PCI-8164 -
 ADLINK PCI-7230/33/34 32-CH Isolated DIO PCI Cardsrd
ADLINK PCI-7230/33/34 32-CH Isolated DIO PCI Cardsrd -
 ADLINK NUPRO-E320DV/NUPRO-E320 industrial control motherboard
ADLINK NUPRO-E320DV/NUPRO-E320 industrial control motherboard -
 Adlink PCI-8154 Advanced 4-axis Servo & Stepper Motion Controller
Adlink PCI-8154 Advanced 4-axis Servo & Stepper Motion Controller -
 Adlink cPCI-3534/3538-S Series 4/8-port Asynchronous Serial Communications Modules
Adlink cPCI-3534/3538-S Series 4/8-port Asynchronous Serial Communications Modules -
 ADLINK Adlink Digital I/O PCI-7396
ADLINK Adlink Digital I/O PCI-7396 -
 ADLINK 6U Rear Transition Modules cPCI-R6700 Series
ADLINK 6U Rear Transition Modules cPCI-R6700 Series -
 ADLINK cPCI-6700B Industrial Control Board
ADLINK cPCI-6700B Industrial Control Board -
ADLINK NuPRO-965/ NuPRO-965LV PICMG Single Board Computers
-
 ADLINK HSL-DI16DO16-M-NN 16-CH Discrete Input 16-CH Discrete Output Module
ADLINK HSL-DI16DO16-M-NN 16-CH Discrete Input 16-CH Discrete Output Module -
 Adlink cPCI-6770 6U CompactPCI 2.0 Blades
Adlink cPCI-6770 6U CompactPCI 2.0 Blades -
 ADLINK NuPRO-598 REV A1 INDUSTRIAL CONTROL MOTHERBOARD
ADLINK NuPRO-598 REV A1 INDUSTRIAL CONTROL MOTHERBOARD -
 ADLINK PCI-7200 PCI Motion Control Card Acquisition Card 51-12001-0C20
ADLINK PCI-7200 PCI Motion Control Card Acquisition Card 51-12001-0C20 -
 ADLINK TECHNOLOGY EOS-1200/M4G/SSD32G(G) Industrial Systems
ADLINK TECHNOLOGY EOS-1200/M4G/SSD32G(G) Industrial Systems -
 ADLINK Centralized Motion Controllers PCI-8134
ADLINK Centralized Motion Controllers PCI-8134 -
 ADLINK cPCI-HR6847E/M2G-1 COMPACT PCI BOARD
ADLINK cPCI-HR6847E/M2G-1 COMPACT PCI BOARD -
 ADLINK PXIE-8638 BUS EXPANSION MODULE
ADLINK PXIE-8638 BUS EXPANSION MODULE -
 ADLINK cPCI-6910 6U CompactPCI 2.0 Blades
ADLINK cPCI-6910 6U CompactPCI 2.0 Blades -
 Adlink NuPRO-E42 51-41808-0A30 Industrial Motherboard
Adlink NuPRO-E42 51-41808-0A30 Industrial Motherboard -
 ADLINK IH61-AA400-A4A1E (IMB-M40H) Industrial Motherboard
ADLINK IH61-AA400-A4A1E (IMB-M40H) Industrial Motherboard -
 ADLINK PCIe-GIE64+ GigE Vision Frame Grabber Card
ADLINK PCIe-GIE64+ GigE Vision Frame Grabber Card -
 ADLINK MXC-6322D(G) Industrial Fanless Computer working
ADLINK MXC-6322D(G) Industrial Fanless Computer working



