
A-B1326AB High Performance AC Servomotors
Basic Servomotor Description The 1326AB Servomotors are a family of high performance, three-phase, brushless AC synchronous motors designed by Allen-Bradley to meet the stringent requirements of servo system applications. This series of standard AC servomotors can be used with 1391 AC Servo Controllers. The performance parameters of these motors with selected amplifiers are listed on page 8. The typical speed-torque curves (see page 9) depict the operational envelope of these motor and controller combinations. Each motor has the following standard features:
• Permanent magnet rotor for increased servo response.
• Three-phase sinusoidal wound stator field for direct transfer of heat to ambient, and smooth operation at low speeds.
• Brushless resolver supplies position, commutation & velocity feedback information. This also provides durability in harsh environments by not having on-board electronics in the motor. 1391 A Quad B (optional) encoder output (up to 2048 ppr) is generated via resolver feedback.
• 100% continuous rated output torque at stall (zero rpm).
• Precision balance of 0.0005” (0.0127 mm) total peak-peak displacement.
• Vertical shaft up or down mounting.
• TENV construction.
• IP65 rated (when used with the Shaft Seal option) to withstand harsh environments. Motor is dust-tight and able to withstand pulsating water jets without liquid entering the motor. Important: 1326AB motors lose the IP 65 rating when externally mounted encoder/resolver feedback or blower packages are used.
• Normally closed thermal switch in the motor winding (rated 115V AC at 1A, 24V DC at 1A) provides thermal overload indication.
• Environmentally sealed power and feedback cable packages. Power and resolver feedback cables can be ordered as standard (flex), track (multi-flex) or extended length (ES).
• MIL spec connectors are standard.
• Ferrite magnets for cost effective performance.
• UL recognized insulation system (file # E57948).
Options available for the 1326AB include (option code designation or catalog number in parenthesis):
• Integral spring-set holding brakes with 90V DC coils (-A4, -A5, -A7) or 24V DC coils (-K4, -K5, -K7).
• Brake Power Supply (1326-MOD-BPS) converts 115V AC to the voltage needed for 90V DC brakes (-A4, -A5 and -A7).
• Shaft Oil Seal kits (1326AB-MOD-SSV-xx) for field installation of Viton shaft seals. Motor disassembly is not required.
• NEMA Inch (-11) or IEC metric flange mount (-21) with metric shafts.
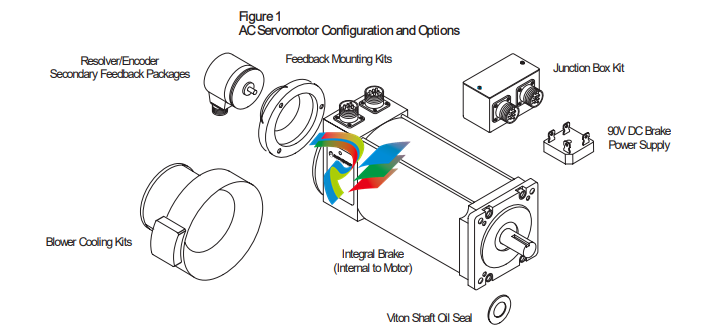
• Resolver Feedback Packages (1326AB-MOD-Vxxxx) provide 4.25” (108 mm) transducers which offer absolute/vernier or single brushless resolver feedback for use with Allen-Bradley 8600GP, IMC rack and S Class motion controllers. • Junction Box Kit (1326AB-MOD-RJxx) available with axially mounted connectors. Connector version allows the motor connectors to be brought out axially to the motor (rather than radially) without further wiring. • Secondary Feedback Mounting Kits (1326AB-MOD-Mx) for field installation of an Allen-Bradley Encoder (845H) or resolver. Using a 1326AB motor with a 1391B-ES (or 1391-DES) with A Quad B feedback (up to 2048 ppr) eliminates the need for encoder mounting. • Blower Cooling Kit (1326AB-MOD-G3, G4) provides air over cooling for up to 35% more torque output on most 1326AB “C” frame motors. The kit can be field mounted on the rear of 1326AB-Cxx motors (including motors with brakes). For motors using secondary motor mounted feedback (1326AB-MOD-M60), use option “G4.” • Cables for power (1326-CPxx . .) and feedback (1326-CFx . . - commutation, 1326-CEx . . - encoders) are available in lengths up to 100 ft .(30 m) for standard and high flex applications Power (1326ES-CPxx . .) and commutation (1326ES-CFx . .) cables over 100 ft. (30 m), up to 300 ft. (90 m) are available when using 1391B-ES or 1391-DES drives only. All kits are supplied as motor accessories and must be specified as a separate item.
Speed-Torque Curves Typical speed-torque curves for the standard 1326AB servomotors are contained on the following pages. Definitions of the terms used are provided below. Tc – rated torque of motor with windings at rated temperature and an ambient of 40°C. The controller is operating in a rated ambient of 60°C. Tp – the peak torque that can be produced by the motor/controller combination with both at rated temperature and the motor in a 40°C ambient and the controller in a 60°C ambient. Since 200% current torque peaks are common in many applications for optimal controller usage, the following curves show typical system performance. Higher peak torques are permissible where RMS torque is less than or equal to the rated torque (Tc). 1391B-ES/1391-DES operation is shown in the outer envelope and will show higher speed and 300% torque capability. Rated Speed – the operating speed of the controller and motor combination at which a minimum of 70% of continuous rated torque (Tc) can be developed. This point is defined with the motor at 25°C and controller operating in a 60°C ambient.
Rated Operation Area – boundary of speed-torque curve where the motor and controller combination may operate on a servo basis without exceeding the RMS rating of either. See page 31 for formula details.

Intermittent Operation Area – Boundary of speed-torque curve where the motor and controller combination may operate in acceleration-deceleration mode without exceeding peak rating of either, provided that the duty cycle RMS continuous torque limit is not exceeded. Continuous Current – Rated current of motor with windings at rated temperature and an ambient of 40°C. The controller is operating in a rated ambient of 60°C. Peak Current – The amount of current which can be applied to the motor without causing damage to the motor. Mechanical Time Constant – Time taken by the motor to reach 63% of final speed when a step voltage is applied. Electrical Time Constant – The time required for the motor to reach 63% of rated current. Max. Ambient Temperature – Maximum environmental temperature in which the motor can be operated at rated loads without exceeding its insulation type temperature rise limits. Insulation Class – Designation of operating temperature limits of the motor insulation materials. Thermal Time Constant – Time for motor windings to reach 63% of continuous temperature rise with constant watts loss. Torque Constant – At the stated motor temperature the amount of torque developed for one ampere of motor current. Voltage Constant – Value of the generated voltage at a specified speed when the rotor is moved mechanically in the magnetic field. Terminal Resistance – Winding resistance. Inductance – Winding inductance measured by a step input of zero impedance voltage applied to the locked rotor. Rotor Polar Moment of Inertia – Moment of inertia about the axis of rotation. Motor Weight – Weight of the complete motor (including brake, if supplied) less the weight of options. Balance – Compensation of rotor weight distribution to reduce vibrational resonance. Motors are factory balanced under running speeds
This section provides detailed information on the various options available for the 1326 AC Servomotor. Integral Holding Brake (Option -Ax or -Kx) The 1326AB servomotor contains an integral holding brake when the catalog number contains a suffix of “-Ax” (90V DC input) or “-Kx” (24V DC input). The brake is a disc type that is spring-set upon removal of power. The brake is designed to hold a load at rest and provide limited braking torque for emergency stopping. The brake is not intended as a positioning brake (brake backlash is 0.8 arc-minutes maximum) or to be continuously cycled to assist in stopping a load. When used as a parking brake, the brake must not be energized/de-energized more than 90 times an hour. A parking brake is only meant to hold a stationary load and is not intended to stop motor movement, unless a power interruption occurs. For further information, refer to Table B and the Bulletin 1391 Instruction Manual.

Brake Power Supply for 90V DC Brakes (1326-MOD-BPS) The Brake Power Supply converts 120V AC to the voltage needed for 90V DC brakes. Up to four brakes can be connected to one power supply. However, if independent control of multiple motors is desired, one power supply per motor must be used. Refer to Figure 13 for dimension and wiring information. Important: 24V DC brakes require a user supplied power supply capable of producing 24V DC at 0.88A to 1.2A. Specifications Power Supply Input Rating: 120V AC, single-phase, +10%, –15% Dissipation: 5 watts per motor
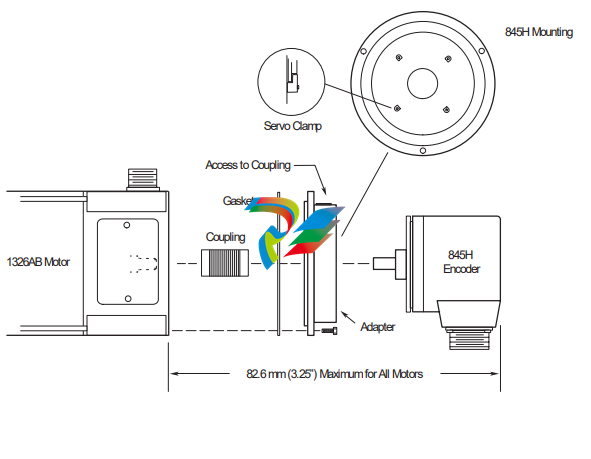
Encoder Mounting Adapters (1326AB-MOD-Mxx) Several adapters are available for mounting Allen-Bradley 845 H or T encoders to 1326AB Servomotors. Refer to the figure below for further information. Important: The IP 65 rating of the motor is not maintained when using this option.
Shaft Oil Seal (1326AB-MOD-SSV-xx) A Viton shaft oil seal is available for field installation on the motor shaft. The seal is to be used in applications where the motor shaft may be subjected to occasional oil splashes (motor is mounted to gearbox, etc.). The kit is not intended to be used in applications where the motor shaft is partially or fully submerged in oil.
Resolver Feedback Package (1326AB-MOD-Vxxxx) Figure 15 shows the dimensions of the 1326AB Resolver Feedback Package. Important: The IP 65 rating of the motor is not maintained when using this option.
Figure 15 Resolver Feedback Package Dimensions
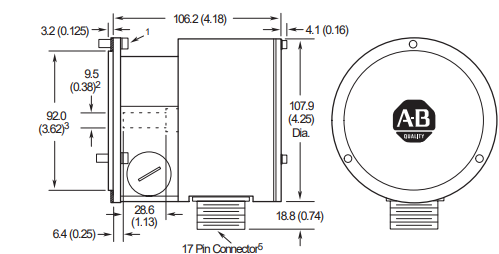
1 +0.000/–0.0127 (+0.0000/–0.0005) tolerance. 2 +0.000/–0.0762 (+0.0000/–0.003) tolerance. 3 All mounting hardware provided in Resolver Feedback Mounting Kit. 4 Cannon female connector CA3102R20–29P or equivalent mounted on the package. Cannon male mating connector CA3106F–20–295–A95 or equivalent. 5 Refer to the 1326AB Resolver Feedback Package Product Data for additional information.
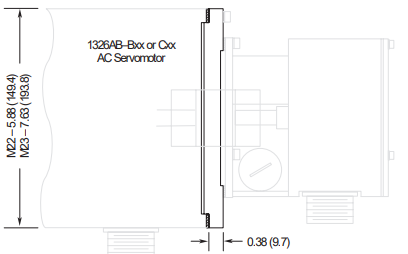
Resolver Feedback Mounting Adapter Kit (1326AB-MOD-Mx) The Resolver Feedback Mounting Kit provides a means of mounting the 1326AB Resolver to B and C series motors. An adapter is not needed for A series motors. Refer to Figure 16 for dimension information. Important: The IP 65 rating of the motor is not maintained when using this option. Figure 16 1326AB Resolver Mounting Kit Dimensions
1326AB–MOD–M22 or 1326AB–MOD–M23 Adapter for Mounting to 1326AB–Bxx or 1326AB–Cxx Motors, Respectively (Adaptor not required for 1326AB–Axx Motors)
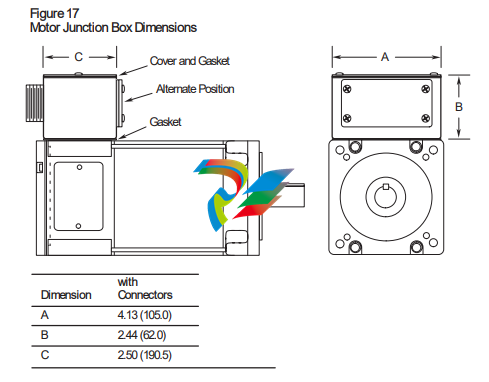
Motor Junction Box Kit (1326AB-MOD-RJxx) The Motor Junction Box Kit provides axially mounted connectors. The connector version allows the motor connectors to be brought out axially to the motor without further wiring. The IP65 rating of the motor is maintained when using this junction box. Dimensions for the junction box are shown in the following figure.
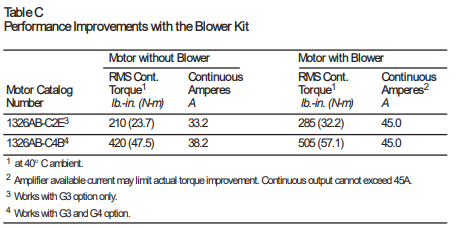
Blower Kits (1326AB-MOD-G3, G4) Two blower kits are available for use with 1326AB “C” Series AC Servomotors. The “G3” kit is designed for the “C2E” and “C4B” servomotors. The continuous current rating of all other “C” frame motors is too high to gain the benefit of the blower kit. The “G3” will not work on motors with a rear mounted encoder. The “G4” kit is designed for the “C4B” motor only. Each kit consists of an impedance protected fan (UL recognized, CSA approved), housing, grill guard and necessary hardware. Important: The IP 65 rating of the motor is not maintained when using this option. Specifications Input Voltage 220/240V AC, 50/60 Hz., single-phase Line Amperes 0.15 / 0.14 Locked Rotor Amperes 0.23 / 0.23 Fan Output 240 CFM Air Inlet Clearance 6 inches (152.4 mm) Weight 4 lbs. (1.81 kg) The following table illustrates the operational improvements realized when the blower kit is installed on the motors shown. Refer to Figure 18 for dimensions.
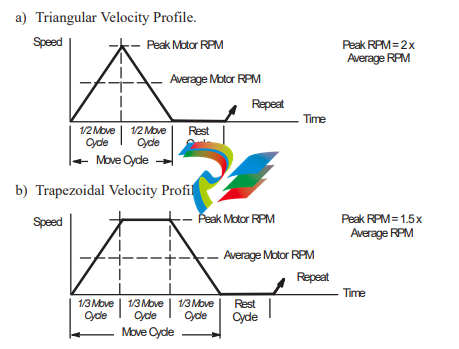
The following steps are a general guide designed to assist in servomotor selection. Formulas provided on the following pages should be used in conjunction with the steps below to determine correct motor sizing. For further assistance, complete the appropriate Application Data Sheet (pages 38-43) and contact your local Allen-Bradley Sales Office. 1. Determine the motor speed requirements. Based on the power train configuration of your application (leadscrew, rack and pinion, conveyor) determine the average and peak rpm of the servomotor. Choose the velocity profile that provides the closest approximation of your cycle.
2. Determine the minimum continuous motor torque required. Calculate motor torque (Tm) using the formulas on page 32, 34 or 36. 3. Determine the peak motor torque required to accelerate the load. If the motor must accelerate within a specified time, determine the system inertia using the formula sheets for your specific power train configuration, otherwise go to step 5. Use the time (Time) to achieve peak rpm, change in rpm (∆rpm), power train inertia (System Inertia) and load torque (Tl) in one of the two formulas that follow: System Inertia in lb.-ft.2 Peak Torque = System Inertia x ∆rpm 308 x Time (to accelerate) + Tl where: Peak Torque = total motor torque required to accelerate the load in lb.-ft. System Inertia = total system inertia (including motor) in lb.-ft.2 Time = acceleration time (in seconds) Tl = load torque present at the motor shaft during accel in lb.-ft. ∆rpm = change in motor velocity during acceleration time
where: Peak Torque = total motor torque required to accelerate the load in lb.-in. System Inertia = total system inertia in lb.-in.-s2 (listed as Jtjm on formula sheets) Time = acceleration time (in seconds) Tl = load torque present at the motor shaft during accel in lb.-in. ∆rpm = change in motor velocity during acceleration time. 4. If the motors total time to accelerate/decelerate (t1 + t3) exceeds 20% of the total cycle time (t1+t2+t3+t4), determine the motors average torque with the formula shown
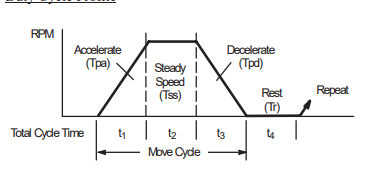
Trms The motors RMS or average torque over the duty cycle. (Expressed in lb.-in. or lb.-ft. The same units must be used throughout the formula.) Tpa Motor peak torque to accelerate to maximum speed. (Expressed in lb.-in. or lb.-ft. The same units must be used throughout the formula.) Tss Motor torque present at the motor shaft during constant speed segment. (Expressed in lb.-in. or lb.-ft. The same units must be used throughout the formula.) Tpd Motor peak torque to decelerate to zero speed. (Expressed in lb.-in. or lb.-ft. The same units must be used throughout the formula.) Tr Torque when motor is at zero speed (typically is Tss). t1, t2, t3, t4 Time for each portion of the duty cycle in seconds. Tpa2 x t1 + Tss2 x t2 + Tpd2 x t3 + Tr2 x t4 t1 + t2 + t3 + t4 Trms = 5. To select a servomotor: a) Select a motor with maximum speed capability of at least the peak rpm calculated in step 1. b) Select a motor with continuous torque capability equal to or greater than the value determined in step 2 or 4, whichever is greater. c) Select a motor with the capability to supply peak torque as determined in step 3, up to the maximum speed determined in step 1.
Servomotor Driven Leadscrew Formulas
Where: Notes: e = Efficiency of leadscrew, e1 (90% typical) or gearbox, e2 (95% typical). G.R. = Ratio of motor speed to leadscrew speed. Jb = Leadscrew inertia (lb.-in.-s2). Jgb = Gearbox inertia at the motor shaft (lb.-in.-s2). Jm = Motor inertia (lb.-in.-s2). Jtjm = Total system inertia at the motor shaft (lb.-in.-s2). Lead = Movement of slide in inches per revolution of leadscrew. Nm = Motor velocity (rpm)
Tb = Torque at leadscrew (lb.-in.). Thrust = Cutting force applied by slide/load on a workpiece (lbs). Tl = Load torque present at the motor shaft during accel (lb.-in.). Tm = Load torque required at the motor (lb.-in.). u = Table/slide sliding coefficient of friction (typically 0.03 to 0.2). V1 = Linear velocity of slide/load (IPM). W1 = Weight of slide and load (lbs.). θ = Angle of leadscrew position referenced from the horizontal axis (0°).
Notes: e = Efficiency of leadscrew, e1 (90% typical) or gearbox, e2 (95% typical). G.R. = Ratio of motor speed to leadscrew speed. Jb = Leadscrew inertia (lb.-in.-s2). Jgb = Gearbox inertia at the motor shaft (lb.-in.-s2). Jm = Motor inertia (lb.-in.-s2). Jtjm = Total system inertia at the motor shaft (lb.-in.-s2). Lead = Movement of slide in inches per revolution of leadscrew. Nm = Motor velocity (rpm). Tb = Torque at leadscrew (lb.-in.). Thrust = Cutting force applied by slide/load on a workpiece (lbs). Tl = Load torque present at the motor shaft during accel (lb.-in.). Tm = Load torque required at the motor (lb.-in.). u = Table/slide sliding coefficient of friction (typically 0.03 to 0.2). V1 = Linear velocity of slide/load (IPM). W1 = Weight of slide and load (lbs.). θ = Angle of leadscrew position referenced from the horizontal axis (0°). (1) Friction torque generated by the weight of the table/slide and part/tool. (2) Torque required for thrust (cutting force) load. (3) Friction torque generated by the thrust (cutting force) load (approximation). (4) Safety factor to account for torque required to overcome seals, gib adjustments, etc. (10% of Tm, min.). (5) This term is for a non-counterbalanced, non-horizontal axis. (6) System inertia should not exceed 5 times the motor inertia.
Typical Leadscrew Data (Using Formulas from Previous Page) Torque at Lead to Produce 1000 lbs. Thrust Force 1. Divide the lb.-in. value shown by efficiency of screw to obtain corrected value
Lead Torque (in./rev) (lb.-in.) 0.200 31.84 0.250 39.80 0.300 47.77 Lead Torque (in./rev) (lb.-in.) 0.333 53.02 0.500 79.61 1.000 159.23
. For thrust other than 1000 lbs. Torque = Required Thrust 1000 x Torque at 1000 lbs.
Inertia of the Leadscrew 1. To determine total leadscrew inertia.
eadscrew Inertia = Total Leadscrew Length (in.) 10 x Inertia (per 10” length) Diameter Inertia (10” length) (inches) (lb.-in.-s2 ) 0.50 0.000048 0.75 0.00023 1.00 0.00072 1.25 0.0018 1.50 0.0038 1.75 0.0068 Diameter Inertia (10” length) (inches) (lb.-in.-s2) 2.00 0.0115 2.25 0.0184 2.50 0.0281 2.75 0.0412 3.00 0.0583 3.50 0.1080
. Formula to determine leadscrew inertia. Jb = 0.000073(1) x D4 x L where: D = Screw diameter in inches. L = Screw length in inches. (1) Leadscrew is assumed to be made of steel. If it is made of aluminum, the 0.000073 constant becomes 0.000024.
Inertia of the Slide/Table Reflected to the Motor per 1000 lbs. Weight 1. For slide/table weight other than 1000 lbs.
Slide/Table Inertia at Leadscrew = Actual Weight 1000 x Reflected Inertia (1000 lbs.) Lead Reflected Inertia (per 1000 lbs.) (in./rev) (lb.-in.-s2) 0.200 0.0026 0.250 0.0042 0.300 0.0060 Lead Reflected Inertia (per 1000 lbs.) (in./rev) (lb.-in.-s2 ) 0.333 0.0074 0.500 0.0167 1.000 0.0666
Typical Rack & Pinion System Data (Using Rack and Pinion Formulas from Previous Page)
Torque at Pinion to Produce 1000 lbs. Thrust Force 1. Divide lb.-in. value shown at pinion by gearbox ratio and efficiency to obtain required motor torque (Tm) 2. To determine pinion torque for other thrust values, divide the thrust by 1000 and multiply by the pinion torque shown for the proper radius. Pinion Radius1 Pinion Torque (inches) (lb.-in.) 0.5 526.3 1.0 1052.6 1.5 1578.9 1 Pinion efficiency of 95% assumed. Pinion Radius1 Pinion Torque (inches) (lb.-in.) 2.0 2105.3 3.0 3157.9 4.0 4210.5
Torque at Pinion to Move 1000 lbs. Total Table/Slide Weight 1. Divide the lb.-in. value shown at pinion by gearbox ratio and efficiency to obtain required motor torque (Tm) 2. To determine pinion torque for other weight values, divide the weight by 1000 and multiply by the pinion torque shown for the proper radius.
Torque at Drive Pulley/Roller 1 w/1000 lbs. Load 1. Divide lb.-in. value shown at the roller by the gearbox ratio, roller/ belt (e1) and gearbox (e2) efficiency to obtain required motor torque (Tm) 2. To determine pulley/roller torque for other load values, divide the load weight by 1000 and multiply by the pulley/roller torque shown for the appropriate radius.
-
 Hirschmann RS20-1600M2T1SDAEHH03.1.02 Rail Switch
Hirschmann RS20-1600M2T1SDAEHH03.1.02 Rail Switch -
 Hirschmann BRS30-24TX Industrial Rail Switch
Hirschmann BRS30-24TX Industrial Rail Switch -
 Hirschmann RSPM20-4T14T1EV9HHS999.9.99 Managed Ethernet Switch
Hirschmann RSPM20-4T14T1EV9HHS999.9.99 Managed Ethernet Switch -
 Hirschmann BELDEN RS40-0009CCCCSDAPHH09.0.14 / RS400009CCCCSDAPHH09014
Hirschmann BELDEN RS40-0009CCCCSDAPHH09.0.14 / RS400009CCCCSDAPHH09014 -
Hirschmann RS40 Rail Switch RS40-0009CCCCSDAE
-
 Hirschmann BELDEN RS30-0802T1T1SDAP / RS300802T1T1SDAP Fully Managed Layer 2 Compact Rail Switch
Hirschmann BELDEN RS30-0802T1T1SDAP / RS300802T1T1SDAP Fully Managed Layer 2 Compact Rail Switch -
 Hirschmann BELDEN RS20-0800M2M2SDAUHH / RS200800M2M2SDAUHH
Hirschmann BELDEN RS20-0800M2M2SDAUHH / RS200800M2M2SDAUHH -
 Hirschmann EAGLE30-04022O6TT999SCCY9HSE3F Industrial Firewall Router Switch
Hirschmann EAGLE30-04022O6TT999SCCY9HSE3F Industrial Firewall Router Switch -
 Hirschmann RS20-1600T1T1SDAEHH09.0.14 RS20 Rail Mount Ethernet Switch
Hirschmann RS20-1600T1T1SDAEHH09.0.14 RS20 Rail Mount Ethernet Switch -
 Hirschmann EAGLE0200T1T1TDDY90000HHE05.3.03 Industrial Security Router
Hirschmann EAGLE0200T1T1TDDY90000HHE05.3.03 Industrial Security Router -
Hirschmann - BELDEN MIPP-AD-1L9P
-
 HIRSCHMANN RSPM20-4Z64Z6TV9HHS9 942 106-999 RAIL SAFETY SWITCH
HIRSCHMANN RSPM20-4Z64Z6TV9HHS9 942 106-999 RAIL SAFETY SWITCH -
 HIRSCHMANN FIBEROPTIC MODULE FIP P/N: OZDFIPG3T
HIRSCHMANN FIBEROPTIC MODULE FIP P/N: OZDFIPG3T -
 HIRSCHMANN RS20-1600M2M2SDAUHH Ethernet rack-mounted switch
HIRSCHMANN RS20-1600M2M2SDAUHH Ethernet rack-mounted switch -
 HIRSCHMANN BELDEN RS20-0400T1T1SDAEHH04.0.01 / RS200400T1T1SDAEHH04001
HIRSCHMANN BELDEN RS20-0400T1T1SDAEHH04.0.01 / RS200400T1T1SDAEHH04001 -
HIRSCHMANN MM2-4FXM3 MICE Media Module
-
HIRSCHMANN RS20-0800M2M2SDAE Industrial Ethernet Rail Switch
-
 Hirschmann RS20-2400T1T1SDAP / RS20-2400T1T1SDAPHH05.0.02
Hirschmann RS20-2400T1T1SDAP / RS20-2400T1T1SDAPHH05.0.02 -
 GE MLJ1005B010H00C MLJ Digital Synchromism Check
GE MLJ1005B010H00C MLJ Digital Synchromism Check -
 ALSTOM MICROTECH DX21-M2 Digital Excitation Controller
ALSTOM MICROTECH DX21-M2 Digital Excitation Controller -
HIRSCHMANN BRS20-1200ZZZZ-STCY99HHSES
-
 HIRSCHMANN MM3-4FXM2 MICE Media Module
HIRSCHMANN MM3-4FXM2 MICE Media Module -
Hirschmann RSB20-0800T1T1SAABHH 8Port ENet Rail Switch RSB20
-
 Hirschmann MACH102-8TP Ethernet Switch
Hirschmann MACH102-8TP Ethernet Switch -
 SAACKE DDZ-M marine steam pressure atomizer
SAACKE DDZ-M marine steam pressure atomizer -
 SAACKE SKV-A marine rotary cup atomizer
SAACKE SKV-A marine rotary cup atomizer -
 SAACKE Seavis HMI05e
SAACKE Seavis HMI05e -
 Kollmorgen MMC-SD-2.0-230 Servo Drive 100-240VAC 2KW 10A Output 3PH 100-240VAC
Kollmorgen MMC-SD-2.0-230 Servo Drive 100-240VAC 2KW 10A Output 3PH 100-240VAC -
 Kollmorgen Servo drive CR10550
Kollmorgen Servo drive CR10550 -
 Kollmorgen AKD-P01207-NACN-0054 Servo Driver
Kollmorgen AKD-P01207-NACN-0054 Servo Driver -
 Kollmorgen S406M-CA-036 Servostar
Kollmorgen S406M-CA-036 Servostar -
.png) Kollmorgen AKD-B02407-NAAN-0000 Digital Servo Drive
Kollmorgen AKD-B02407-NAAN-0000 Digital Servo Drive -
 Kollmorgen SERVOSTAR S406AM-CA Digital Servo Drive
Kollmorgen SERVOSTAR S406AM-CA Digital Servo Drive -
 KOLLMORGEN SERVOSTAR 603-AS SERVO AMPLIFIER_SERVOSTAR603AS_S60301
KOLLMORGEN SERVOSTAR 603-AS SERVO AMPLIFIER_SERVOSTAR603AS_S60301 -
Kollmorgen S700 Servo Controller (S70602-NANANA-NA)
-
 Kollmorgen MPK411 controller
Kollmorgen MPK411 controller -
 KOLLMORGEN MMC-SD-1.3-460-D Smart Drive
KOLLMORGEN MMC-SD-1.3-460-D Smart Drive -
 KOLLMORGEN AKM21C-CKB2AA-00 / AKM21CCKB2AA00 Servomotor
KOLLMORGEN AKM21C-CKB2AA-00 / AKM21CCKB2AA00 Servomotor -
 BECKHOFF AX5106-0000-0200 | Digital Compact Servo Drives 1-channel
BECKHOFF AX5106-0000-0200 | Digital Compact Servo Drives 1-channel -
 BECKHOFF C3620-0000 INDUSTRIAL COMPUTER (MOTORSHELVES)
BECKHOFF C3620-0000 INDUSTRIAL COMPUTER (MOTORSHELVES) -
 Beckhoff EK1960-0000 TwinSAFE Compact Controller
Beckhoff EK1960-0000 TwinSAFE Compact Controller -
 Beckhoff C6930-0050 Control Cabinet Industrial PC
Beckhoff C6930-0050 Control Cabinet Industrial PC -
 Beckhoff CP7711-0001-0030 Industrial Computer Detection
Beckhoff CP7711-0001-0030 Industrial Computer Detection -
 Beckhoff CX1001-0111 Embedded PC CPU Module
Beckhoff CX1001-0111 Embedded PC CPU Module -
 Beckhoff C6017-0020 | Ultra-compact Industrial PC
Beckhoff C6017-0020 | Ultra-compact Industrial PC -
 Beckhoff EK1322 | 2-port EtherCAT P junction with feed-in
Beckhoff EK1322 | 2-port EtherCAT P junction with feed-in -
 Beckhoff CP2219-0010 Panel
Beckhoff CP2219-0010 Panel -
 BECKHOFF C6015-0020 ULTRA COMPACT INDUSTRIAL PC
BECKHOFF C6015-0020 ULTRA COMPACT INDUSTRIAL PC -
 BECKHOFF CX2030-0120/Standard CPU Module Embedded PC Windows PLC controller
BECKHOFF CX2030-0120/Standard CPU Module Embedded PC Windows PLC controller -
 Beckhoff CP7721-1090-0020 Panel PC
Beckhoff CP7721-1090-0020 Panel PC -
 Beckhoff PC CPU Module CX5130-0175
Beckhoff PC CPU Module CX5130-0175 -
 Beckhoff C6920-0050 Control Cabinet
Beckhoff C6920-0050 Control Cabinet -
 Beckhoff EL6631 EtherCAT 2-Port Communication Interface, Profinet RT Controller
Beckhoff EL6631 EtherCAT 2-Port Communication Interface, Profinet RT Controller -
 Beckhoff CP6202-0001-0060 touch screen panel PC
Beckhoff CP6202-0001-0060 touch screen panel PC -
 Beckhoff CP3916-1002-0000 Multi-Touch Control Panel
Beckhoff CP3916-1002-0000 Multi-Touch Control Panel -
 Beckhoff EP1809-0021 | EtherCAT Box, 16-channel digital input, 24 V DC, 3 ms, M8Preferred type
Beckhoff EP1809-0021 | EtherCAT Box, 16-channel digital input, 24 V DC, 3 ms, M8Preferred type -
 Beckhoff CX8190 PLC Embedded Industrial PC Ethernet Controller
Beckhoff CX8190 PLC Embedded Industrial PC Ethernet Controller -
 Beckhoff CX2100-0914 Power Supply for External
Beckhoff CX2100-0914 Power Supply for External -
 Beckhoff Automation CP6906-0001-0000 HMI
Beckhoff Automation CP6906-0001-0000 HMI -
 Beckhoff EP7342-0002 Module
Beckhoff EP7342-0002 Module -
 Beckhoff CX1020-0112 / CX1100-0910 / CX1020-N010 / CX1100-0003 Windows CPU
Beckhoff CX1020-0112 / CX1100-0910 / CX1020-N010 / CX1100-0003 Windows CPU -
 Beckhoff EP7211-0034 EtherCAT Box 1 Channel Motion Interface
Beckhoff EP7211-0034 EtherCAT Box 1 Channel Motion Interface -
 Beckhoff C6240-0030 Control cabinet Industrial PC
Beckhoff C6240-0030 Control cabinet Industrial PC -
 beckhoff motherboard CB1052-0004 CB1052-0004
beckhoff motherboard CB1052-0004 CB1052-0004 -
 Beckhoff AX2006-AS Servo Drive / Variable Frequency Drive
Beckhoff AX2006-AS Servo Drive / Variable Frequency Drive -
BECKHOFF CP6207-0001-0020 NSMP
-
 Beckhoff C6930-1142-0060 Industrial Computer
Beckhoff C6930-1142-0060 Industrial Computer -
 Beckhoff FC7501-0000 interface card
Beckhoff FC7501-0000 interface card -
 Beckhoff CX5140-0175 Embedded PC PLC CPU CX5140 Industrial Controller
Beckhoff CX5140-0175 Embedded PC PLC CPU CX5140 Industrial Controller -
 Beckhoff CP7802-1100-0010: High-End IP65 Control Panel with DVI/USB Extended Interface
Beckhoff CP7802-1100-0010: High-End IP65 Control Panel with DVI/USB Extended Interface -
BECKHOFF CP3716-1058-0010 CONTROL PANEL
-
 Beckhoff AX8108-0000 Single-Axis Module
Beckhoff AX8108-0000 Single-Axis Module -
 Beckhoff CU8851-0000 | USB extension, USB Extended 2.0 receiver box
Beckhoff CU8851-0000 | USB extension, USB Extended 2.0 receiver box -
Beckhoff C6017-0030 | Ultra-compact Industrial PC
-
 Beckhoff CX1001-0120/CX10010120.cx1000-n001.cx1000-n000 System Overview
Beckhoff CX1001-0120/CX10010120.cx1000-n001.cx1000-n000 System Overview -
 Beckhoff CPU Module CX5140-0155/4GB CPU Module
Beckhoff CPU Module CX5140-0155/4GB CPU Module -
 Beckhoff CP6533-0001-005: Built-in Panel PC with High-Definition Multi-Touch Control
Beckhoff CP6533-0001-005: Built-in Panel PC with High-Definition Multi-Touch Control -
 Beckhoff EL5042 | EtherCAT Terminal, 2-channel encoder interface, BiSS® C
Beckhoff EL5042 | EtherCAT Terminal, 2-channel encoder interface, BiSS® C -
 Beckhoff C6920-1080-0040: Premium Control Cabinet Industrial PC
Beckhoff C6920-1080-0040: Premium Control Cabinet Industrial PC -
 Beckhoff C6920-0060 | Control cabinet Industrial PC
Beckhoff C6920-0060 | Control cabinet Industrial PC -
 Beckhoff Embedded-PC CX5010-1121
Beckhoff Embedded-PC CX5010-1121 -
 Beckhoff CB3050-0010 Mainboard Motherboard
Beckhoff CB3050-0010 Mainboard Motherboard -
 Beckhoff PLC module CX1020-0000 Basic CPU module (service phase)
Beckhoff PLC module CX1020-0000 Basic CPU module (service phase) -
 Beckhoff CP7812-1056-0010 15" Multitouch Display Control Panel
Beckhoff CP7812-1056-0010 15" Multitouch Display Control Panel -
 Beckhoff CX5120-0115 /2GB Controller Module
Beckhoff CX5120-0115 /2GB Controller Module -
 Beckhoff CP7201-1000-0000 Industrial Panel PC
Beckhoff CP7201-1000-0000 Industrial Panel PC -
 Beckhoff Servo Motor AM8061-0JH1-0000
Beckhoff Servo Motor AM8061-0JH1-0000 -
 BECKHOFF CP6503-0001-0050 Built-in Panel PC
BECKHOFF CP6503-0001-0050 Built-in Panel PC -
Beckhoff CP3919-0010 Display G190ETN01.2 19" PCT V04. Multi-touch Control Panel
-
 Beckhoff CX5110-0112-9020/000368201 Embedded PC Intel Atom Processor
Beckhoff CX5110-0112-9020/000368201 Embedded PC Intel Atom Processor -
 Beckhoff AX8206-0000 Dual-Axis Module
Beckhoff AX8206-0000 Dual-Axis Module -
Beckhoff Nail Operating Terminal CP7032-1031-0010
-
Beckhoff AM8042-0EH1-0000 Servomotor 4.10 Nm (M0), F4 (87 mm)
-
 Beckhoff EK9300 Beckhoff CPU Module
Beckhoff EK9300 Beckhoff CPU Module -
Beckhoff CP3224-0020 Multitouch-Panel-PC
-
 Beckhoff CP2712-0000 12.1" 24VDC Touch Screen WMD0
Beckhoff CP2712-0000 12.1" 24VDC Touch Screen WMD0 -
 BECKHOFF CX5240-0195 / 0000289234 Embedded PC 40 GB CFast Card
BECKHOFF CX5240-0195 / 0000289234 Embedded PC 40 GB CFast Card -
 Beckhoff CP6932-1000-0000 Control Panel
Beckhoff CP6932-1000-0000 Control Panel -
 BECKHOFF CX5120-0121 PLC Module
BECKHOFF CX5120-0121 PLC Module -
 Beckhoff EL3218 | EtherCAT Terminal, 8-channel analog input
Beckhoff EL3218 | EtherCAT Terminal, 8-channel analog input -
Beckhoff C6640-0050 | Control cabinet Industrial PC
-
 Beckhoff Cx5130-0120/4GB Embedded-PC
Beckhoff Cx5130-0120/4GB Embedded-PC -
 BECKHOFF CX2030-0122 PLC PROCESSOR
BECKHOFF CX2030-0122 PLC PROCESSOR -
 BECKHOFF CX5020-0122 Controller Module
BECKHOFF CX5020-0122 Controller Module -
 Beckhoff CP3915-0000 Multitouch Panel
Beckhoff CP3915-0000 Multitouch Panel -
 BECKHOFF EL3014 | EtherCAT Terminal
BECKHOFF EL3014 | EtherCAT Terminal -
 BECKHOFF Industrial Computer c6920-1057-0030
BECKHOFF Industrial Computer c6920-1057-0030 -
 Beckhoff CX5130-0141/4GB CX5130-0141 Embedded PC
Beckhoff CX5130-0141/4GB CX5130-0141 Embedded PC -
 Beckhoff C6240-1052-0040 4-086-06-3073 Industrial Computer
Beckhoff C6240-1052-0040 4-086-06-3073 Industrial Computer -
 Beckhoff CX5140-0135 /4GB High-Performance Embedded Industrial PC
Beckhoff CX5140-0135 /4GB High-Performance Embedded Industrial PC -
 Beckhoff C6515-1001-0000 Industrial PC
Beckhoff C6515-1001-0000 Industrial PC -
 Beckhoff AX5103-0000-0200 - Digital Compact Servo Drives
Beckhoff AX5103-0000-0200 - Digital Compact Servo Drives -
 Beckhoff CX2030-0130-1003/4GB Basic CPU module
Beckhoff CX2030-0130-1003/4GB Basic CPU module -
 Beckhoff AX8620-0000 Power Supply Module
Beckhoff AX8620-0000 Power Supply Module -
 Beckhoff CX9020-0111 module with
Beckhoff CX9020-0111 module with -
 Beckhoff EL7332 PLC Module
Beckhoff EL7332 PLC Module -
 BECKHOFF CP7709-0001-0020 HMI
BECKHOFF CP7709-0001-0020 HMI -
 Beckhoff CX5120-0155/2GB Embedded PC
Beckhoff CX5120-0155/2GB Embedded PC -
 BECKHOFF CP7037-1037-0010 OPERATOR INTERFACE TOUCHSCREEN
BECKHOFF CP7037-1037-0010 OPERATOR INTERFACE TOUCHSCREEN -
 Beckhoff EK9000 | ModbusTCP/UDP Bus Coupler
Beckhoff EK9000 | ModbusTCP/UDP Bus Coupler -
 Beckhoff Touch Panel Screen CP6020 -0000-0000
Beckhoff Touch Panel Screen CP6020 -0000-0000 -
 Beckhoff CX2020-0121 Module FAST Shipping
Beckhoff CX2020-0121 Module FAST Shipping -
 Beckhoff CX2030-0125 Basic CPU Module
Beckhoff CX2030-0125 Basic CPU Module -
 Beckhoff CP3918-0000 Multi-Touch 18.5" Control Panel
Beckhoff CP3918-0000 Multi-Touch 18.5" Control Panel -
 Automotion LC4A00010 DC BL Motor Control, ATS, Sub Assy, SCP, 115VAC,
Automotion LC4A00010 DC BL Motor Control, ATS, Sub Assy, SCP, 115VAC, -
 500T-115VAC - VAS ENGINEERING - DORIC 500 SERIES DIGITAL TEMP INDICATOR
500T-115VAC - VAS ENGINEERING - DORIC 500 SERIES DIGITAL TEMP INDICATOR -
 Honeywell X-DCS2000/EN Digital Integrated System Manager 50/60Hz 100-240V #4
Honeywell X-DCS2000/EN Digital Integrated System Manager 50/60Hz 100-240V #4 -
 Kollmorgen S60600 Servostar600 606-Fan 4 kVA, 6 A, 3 X 230 - 480 V
Kollmorgen S60600 Servostar600 606-Fan 4 kVA, 6 A, 3 X 230 - 480 V


