
ABBAC 800M PROFIBUS DP Configuration
the project. The conversion is done with the GSD Import Tool.
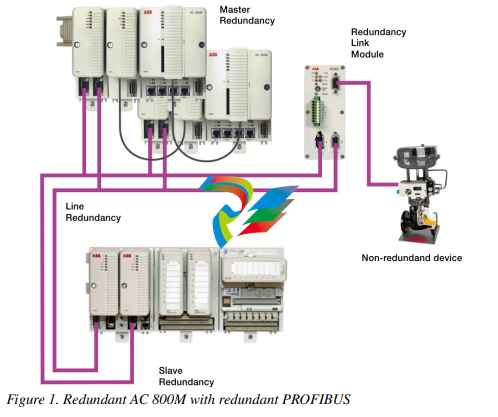
The following figure shows the redundant PROFIBUS connected to the redundant
AC 800M controller
Section 2 Functional Description
PROFIBUS Basics
Basic Functions DP-V0
Cyclic Data Communication
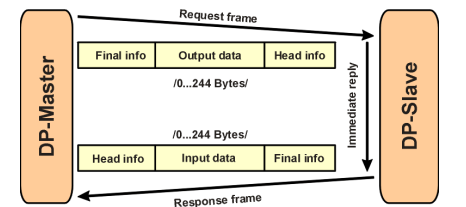
The data communication between the DPM1 (DP Master Class 1) and its assigned
slaves is automatically handled by the DPM1 in a defined, recurring sequence. With
each user data transfer, the master can write up to 244 bytes of output data to the
slave and read up to 244 bytes of input data from the slave. The Data is read and
written synchronously in one procedure
The assignment of the slaves to the DPM1, CI854/CI854A in this case, is done via
the HW configuration in Control Builder M.
The data communication between the DPM1 and the slaves is divided into three
phases: parameterization, configuration and data transfer. Before the master
includes a DP slave in the data transfer phase, a check is run during the
parameterization and configuration phase to ensure that the configured setpoint
configuration matches the actual device configuration. During this check, the device
type, format and length information and the number of inputs and outputs must also
correspond. This provides you with reliable protection against parameterization
errors.
Diagnostics
In addition to the cyclic data the PROFIBUS slave unit provides diagnostic data.
With this diagnostic data the slave can indicate errors or warnings on the slave unit,
the I/O-units or the I/O-channels. Some diagnostic data is generic and defined by the
PNO. But most of the diagnostic data is manufacturer specific.
The following errors/warnings are examples for PROFIBUS diagnostics:
Channel related:
– Wire break
– Short circuit
Module related:
– Wrong module type
– Module missing
Slave related:
– Power supply 2 error
– Internal bus error
The CI854/CI854A supports the operation of PROFIBUS DP-V0 diagnostics. The
diagnostic data transferred from the slave to the master is mapped by the
CI854/CI854A to the unit status of the PROFIBUS slave unit or the related I/O-unit
and is indicated as error or warning in the UnitStatus in Control Builder M for the
specific unit.
Only that diagnostic data configured within the hardware definition file is operated
by the system. The configuration includes
– Selection of diagnostic to be operated by the system.
– Mapping of the diagnostic information within the diagnostic frame on
PROFIBUS to the specific HW unit (slave or I/O unit).
– Definition of the corresponding bit in the unit status for the specific
diagnostic information. Use of device specific codes in
ErrorsAndWarnings and ExtendedStatus.
– Definition if the diagnostic information shall be indicated as error or
warning.
– Definition of the presented text within unit status and alarm/event for the
specific diagnostic information.
– Definition if in addition an alarm or event shall be generated for the
specific diagnostic information. If yes also the severity has to be defined.
For S800 I/O and S900 I/O the configuration for the diagnostics is already specified
in the hardware definition files that are provided with the system. For other slaves
the configuration for PROFIBUS diagnostics can be done via the DeviceImport
Wizard. The Device Import Wizard provides a dialog to pick up the diagnostic data
from the GSD-file and map it to the DeviceSpecific and ExtendedStatus bits of the
HwStatus for the related slave unit or I/O-unit. The dialog also supports the
configuration of alarms/events based on the diagnostic data. For more information
please refer to the online help for the GSD Import Tool.
DP Master Class 1 (DPM1) and Class 2 (DPM2)
TheDP master class 1 is the master that is in cyclic data transmission with the
assigned slaves. To get into the cyclic communication the DPM1 has to configure
the slave before.
The DP master class 2 is used for engineering and configuration. It does not have
cyclic data transmission with the slave devices. Normally a DPM2 is only connected
temporarily to the bus. A DPM2 can have class 2 communication to the slave
devices before the slaves are configured via DPM1 and cyclic communication is
active.
System Behavior
For a DPM1 master the following operating states are defined:
Stop
No data communication between the DPM1 and the slaves.
The CI854/CI854A is of type DP master class 1 (DPM1) and class 2 (DPM2).
Clear
The DPM1 reads the input information of the slaves and keeps the outputs of the
slavs in a fail-safe state (“0” output).
Operate
The DPM1 is in the data transfer phase. In cyclic data communication, inputs are
red from the slaves and output information written to the slaves.
The reaction of the system to a fault during the data transfer phase of the DPM1, for
example a failure of a slave, is determined by the “Auto Clear Modus” defined via
the BP flag configuration in the settings tab for CI854/CI854A. If this parameter is
-
 SEL SEL-3610 Port Server
SEL SEL-3610 Port Server -
 SEL SEL-2730U Unmanaged 24-Port Ethernet Switch
SEL SEL-2730U Unmanaged 24-Port Ethernet Switch -
 SEL SEL-2725 Five-Port Ethernet Switch
SEL SEL-2725 Five-Port Ethernet Switch -
 SEL SEL-2744 Ethernet Switch
SEL SEL-2744 Ethernet Switch -
 SEL SEL-2743 Ethernet Switch
SEL SEL-2743 Ethernet Switch -
 SEL SEL-2742 Ethernet Switch
SEL SEL-2742 Ethernet Switch -
 SEL SEL-2741 Ethernet Switch
SEL SEL-2741 Ethernet Switch -
 SEL SEL-2731 Ethernet Switch
SEL SEL-2731 Ethernet Switch -
 SEL SEL-2902 RJ45 to DB-9 Adapter Panel
SEL SEL-2902 RJ45 to DB-9 Adapter Panel -
 SEL SEL-3390S8 Serial Adapter Card
SEL SEL-3390S8 Serial Adapter Card -
 SEL SEL-3390E4 Network Adapter Card
SEL SEL-3390E4 Network Adapter Card -
 SEL SEL-3390T Time and Ethernet Adapter Card
SEL SEL-3390T Time and Ethernet Adapter Card -
 SEL SEL-3360 Computing Platform
SEL SEL-3360 Computing Platform -
 SEL SEL-3355 Computing Platform
SEL SEL-3355 Computing Platform -
 SEL SEL-5703 Synchrowave Monitoring
SEL SEL-5703 Synchrowave Monitoring -
 SEL SEL-5705 Synchrowave Reports
SEL SEL-5705 Synchrowave Reports -
 SEL Metering Software Solutions
SEL Metering Software Solutions -
 SEL SEL-T35 Time-Domain Power Monitor
SEL SEL-T35 Time-Domain Power Monitor -
 SEL SEL-735 Power Quality and Revenue Meter
SEL SEL-735 Power Quality and Revenue Meter -
 SEL SEL-TWFL Dual Traveling-Wave Fault Locator and 12-Channel MHz Recorder
SEL SEL-TWFL Dual Traveling-Wave Fault Locator and 12-Channel MHz Recorder -
 SEL SEL-5035 acSELerator Diagram Builder Software
SEL SEL-5035 acSELerator Diagram Builder Software -
 SEL SEL-5033 acSELerator RTAC Software
SEL SEL-5033 acSELerator RTAC Software -
 SEL SEL-2411P Pump Automation Controller
SEL SEL-2411P Pump Automation Controller -
 SEL SEL-2411 Programmable Automation Controller
SEL SEL-2411 Programmable Automation Controller -
 SEL SEL-3560 Real-Time Automation Controller (RTAC)
SEL SEL-3560 Real-Time Automation Controller (RTAC) -
 SEL SEL-3555 Real-Time Automation Controller (RTAC)
SEL SEL-3555 Real-Time Automation Controller (RTAC) -
 SEL SEL-3350 Computing Platform
SEL SEL-3350 Computing Platform -
 SEL SEL-3530-4 Real-Time Automation Controller (RTAC)
SEL SEL-3530-4 Real-Time Automation Controller (RTAC) -
 SEL SEL-3505/3505-3 Real-Time Automation Controller (RTAC)
SEL SEL-3505/3505-3 Real-Time Automation Controller (RTAC) -
 SEL Real-Time Automation Controller (RTAC)
SEL Real-Time Automation Controller (RTAC) -
 SEL SEL-2414 Transformer Automation Controller (TAC)
SEL SEL-2414 Transformer Automation Controller (TAC) -
 SEL SEL-734B Advanced Monitoring and Control System
SEL SEL-734B Advanced Monitoring and Control System -
 SEL SEL-734W and LINAM WCS
SEL SEL-734W and LINAM WCS -
 SEL SEL-2431 Voltage Regulator Control
SEL SEL-2431 Voltage Regulator Control -
 SEL SEL-5601-2 Synchrowave Event Software
SEL SEL-5601-2 Synchrowave Event Software -
 SEL SEL-5032 acSELerator Architect Software
SEL SEL-5032 acSELerator Architect Software -
 SEL SEL-5030 acSELerator QuickSet Software
SEL SEL-5030 acSELerator QuickSet Software -
 SEL SEL-751A Feeder Protection Relay
SEL SEL-751A Feeder Protection Relay -
 SEL SEL-2440 DPAC Discrete Programmable Automation Controller
SEL SEL-2440 DPAC Discrete Programmable Automation Controller -
 SEL SEL-2240 Axion
SEL SEL-2240 Axion -
 SEL SEL-401 Protection, Automation, and Control Merging Unit
SEL SEL-401 Protection, Automation, and Control Merging Unit -
 SEL SEL-TMU TiDL Merging Unit
SEL SEL-TMU TiDL Merging Unit -
 SEL SEL-700BT Motor Bus Transfer Relay
SEL SEL-700BT Motor Bus Transfer Relay -
 SEL SEL-849 Motor Management Relay
SEL SEL-849 Motor Management Relay -
 SEL SEL-3790 Low-Voltage Divider Module
SEL SEL-3790 Low-Voltage Divider Module -
 SEL SEL-710-5 Motor Protection Relay
SEL SEL-710-5 Motor Protection Relay -
 SEL SEL-487V Capacitor Bank Protection, Automation, and Control System
SEL SEL-487V Capacitor Bank Protection, Automation, and Control System -
 SEL SEL-351RS Kestrel Single-Phase Recloser Control
SEL SEL-351RS Kestrel Single-Phase Recloser Control -
 SEL SEL-651RA Recloser Control
SEL SEL-651RA Recloser Control -
 SEL SEL-651R Advanced Recloser Control
SEL SEL-651R Advanced Recloser Control -
 SEL SEL-551C Overcurrent/Reclosing Relay
SEL SEL-551C Overcurrent/Reclosing Relay -
 SEL SEL-351S Protection System
SEL SEL-351S Protection System -
 SEL SEL-851 Feeder Protection Relay
SEL SEL-851 Feeder Protection Relay -
 SEL SEL-451 Protection, Automation, and Bay Control System
SEL SEL-451 Protection, Automation, and Bay Control System -
 SEL SEL-751 Feeder Protection Relay
SEL SEL-751 Feeder Protection Relay -
 SEL SEL-311C Transmission Protection System
SEL SEL-311C Transmission Protection System -
 SEL SEL-387L Line Current Differential Relay
SEL SEL-387L Line Current Differential Relay -
 SEL SEL-311L Line Current Differential Protection and Automation System
SEL SEL-311L Line Current Differential Protection and Automation System -
 SEL SEL-787L Line Current Differential Relay
SEL SEL-787L Line Current Differential Relay -
SEL SEL-421 Protection, Automation, and Control System
-
 SEL SEL-9L Line Relay
SEL SEL-9L Line Relay -
 SEL SEL-411L Advanced Line Differential Protection, Automation, and Control System
SEL SEL-411L Advanced Line Differential Protection, Automation, and Control System -
 SEL SEL-587Z High-Impedance Differential Relay
SEL SEL-587Z High-Impedance Differential Relay -
 SEL SEL-7251 Electromechanical Direct-Replacement Assemblies
SEL SEL-7251 Electromechanical Direct-Replacement Assemblies -
 SEL SEL-787Z High-Impedance Differential Relay and SEL-HZM High-Impedance Module
SEL SEL-787Z High-Impedance Differential Relay and SEL-HZM High-Impedance Module -
 SEL SEL-487B Bus Differential and Breaker Failure Relay
SEL SEL-487B Bus Differential and Breaker Failure Relay -
 SEL SEL-387 Current Differential and Overcurrent Relay
SEL SEL-387 Current Differential and Overcurrent Relay -
SEL SEL-387A Current Differential and Overcurrent Relay
-
 SEL SEL-2600 RTD Module
SEL SEL-2600 RTD Module -
 SEL SEL-387E Current Differential and Voltage Relay
SEL SEL-387E Current Differential and Voltage Relay -
 SEL SEL-787-2/-3/-4 Transformer Protection Relay
SEL SEL-787-2/-3/-4 Transformer Protection Relay -
 SEL SEL-487E Transformer Protection Relay
SEL SEL-487E Transformer Protection Relay -
 SEL SEL-2664S Stator Ground Protection Relay
SEL SEL-2664S Stator Ground Protection Relay -
 SEL SEL-300G Generator Relay
SEL SEL-300G Generator Relay -
 SEL SEL-700G Generator Protection Relay
SEL SEL-700G Generator Protection Relay -
SEL SEL-700G Generator Protection Relay
-
 SEL SEL-400G Advanced Generator Protection System
SEL SEL-400G Advanced Generator Protection System -
 SEL SEL-T400L Time-Domain Line Protection
SEL SEL-T400L Time-Domain Line Protection -
 SEL SEL-T401L Ultra-High-Speed Line Relay
SEL SEL-T401L Ultra-High-Speed Line Relay -
 ADLINK Multi-Function DAQ PCI-9222/9223
ADLINK Multi-Function DAQ PCI-9222/9223 -
 ADLINK PICMG Single Board Computers NuPRO-A40H
ADLINK PICMG Single Board Computers NuPRO-A40H -
ADLINK HSL-4XMO HSL-4XMO-TB-D103 HSL-4XMO-CD-N-006
-
 ADLINK industrial computer motherboard NuPRO-965DV
ADLINK industrial computer motherboard NuPRO-965DV -
 AADLINK PCI-7442 switch card Digital I/O
AADLINK PCI-7442 switch card Digital I/O -
 ADLINK PCI-7260 Digital I/O
ADLINK PCI-7260 Digital I/O -
 ADLINK PICMG Single Board Computers NuPRO-852
ADLINK PICMG Single Board Computers NuPRO-852 -
 ADlink 6U CompactPCI 2.0 Blades cPCI-6840
ADlink 6U CompactPCI 2.0 Blades cPCI-6840 -
 Adlink PICMG Single Board Computers NuPRO-935A
Adlink PICMG Single Board Computers NuPRO-935A -
 ADLINK ADLINK NuPRO-841 REV:1.0 PICMG Single Board Computers
ADLINK ADLINK NuPRO-841 REV:1.0 PICMG Single Board Computers -
ADLINK PCI-8254 / PCI-8258 DSP-based 4/8-axis Advanced Motion Controllers
-
 ADLINK NUPRO-780 PICMG Single Board Computers
ADLINK NUPRO-780 PICMG Single Board Computers -
 ADLINK USB-7230/7250 Isolated USB Digital I/O Modules
ADLINK USB-7230/7250 Isolated USB Digital I/O Modules -
 Adlink Technology 51-37111-0C1 cPCI-R8217 cPCI-R3700A PCB Interface Card
Adlink Technology 51-37111-0C1 cPCI-R8217 cPCI-R3700A PCB Interface Card -
 ADLINK DPAC-3020-11(G) Embedded PC Automation Controller
ADLINK DPAC-3020-11(G) Embedded PC Automation Controller -
 ADLINK NuPRO-840 PICMG 1.0 industrial Single Board
ADLINK NuPRO-840 PICMG 1.0 industrial Single Board -
 Adlink 6U CompactPCI 2.0 Blades cPCI-6965
Adlink 6U CompactPCI 2.0 Blades cPCI-6965 -
 ADLINK PCI-9114DG Multi-Function DAQ Card
ADLINK PCI-9114DG Multi-Function DAQ Card -
 Adlink NuPRO-E43 PICMG Single Board Computers
Adlink NuPRO-E43 PICMG Single Board Computers -
 Adlink PCI-7856 Distributed Motion Control
Adlink PCI-7856 Distributed Motion Control -
 ADLINK Mini-ITX Embedded Boards MI-965
ADLINK Mini-ITX Embedded Boards MI-965 -
 ADLINK NuPRO-E340 industrial control motherboard
ADLINK NuPRO-E340 industrial control motherboard -
 ADLINK NuPRO-595 Series Full-Size PICMG 1.0 SBC
ADLINK NuPRO-595 Series Full-Size PICMG 1.0 SBC -
 ADLINK PCIe-GIE64+ / PCIe-GIE62+ 4 / 2-CH PCI Express® Power over Ethernet Frame Grabbers
ADLINK PCIe-GIE64+ / PCIe-GIE62+ 4 / 2-CH PCI Express® Power over Ethernet Frame Grabbers -
 ADLINK CPCI-6910AM-M1G 6U Dual Core Xeon CompactPCI Universal SBC
ADLINK CPCI-6910AM-M1G 6U Dual Core Xeon CompactPCI Universal SBC -
 ADLINK/AMPRO CM-435-v2/CM-435 Extreme Rugged™ PC/104 Single Board Computer
ADLINK/AMPRO CM-435-v2/CM-435 Extreme Rugged™ PC/104 Single Board Computer -
 ADLINK Technology 51-37111-0C1 PCB Interface Card
ADLINK Technology 51-37111-0C1 PCB Interface Card -
 Adlink Centralized Motion Controllers PCI-8164
Adlink Centralized Motion Controllers PCI-8164 -
 ADLINK PCI-7230/33/34 32-CH Isolated DIO PCI Cardsrd
ADLINK PCI-7230/33/34 32-CH Isolated DIO PCI Cardsrd -
 ADLINK NUPRO-E320DV/NUPRO-E320 industrial control motherboard
ADLINK NUPRO-E320DV/NUPRO-E320 industrial control motherboard -
 Adlink PCI-8154 Advanced 4-axis Servo & Stepper Motion Controller
Adlink PCI-8154 Advanced 4-axis Servo & Stepper Motion Controller -
 Adlink cPCI-3534/3538-S Series 4/8-port Asynchronous Serial Communications Modules
Adlink cPCI-3534/3538-S Series 4/8-port Asynchronous Serial Communications Modules -
 ADLINK Adlink Digital I/O PCI-7396
ADLINK Adlink Digital I/O PCI-7396 -
 ADLINK 6U Rear Transition Modules cPCI-R6700 Series
ADLINK 6U Rear Transition Modules cPCI-R6700 Series -
 ADLINK cPCI-6700B Industrial Control Board
ADLINK cPCI-6700B Industrial Control Board -
ADLINK NuPRO-965/ NuPRO-965LV PICMG Single Board Computers
-
 ADLINK HSL-DI16DO16-M-NN 16-CH Discrete Input 16-CH Discrete Output Module
ADLINK HSL-DI16DO16-M-NN 16-CH Discrete Input 16-CH Discrete Output Module -
 Adlink cPCI-6770 6U CompactPCI 2.0 Blades
Adlink cPCI-6770 6U CompactPCI 2.0 Blades -
 ADLINK NuPRO-598 REV A1 INDUSTRIAL CONTROL MOTHERBOARD
ADLINK NuPRO-598 REV A1 INDUSTRIAL CONTROL MOTHERBOARD -
 ADLINK PCI-7200 PCI Motion Control Card Acquisition Card 51-12001-0C20
ADLINK PCI-7200 PCI Motion Control Card Acquisition Card 51-12001-0C20 -
 ADLINK TECHNOLOGY EOS-1200/M4G/SSD32G(G) Industrial Systems
ADLINK TECHNOLOGY EOS-1200/M4G/SSD32G(G) Industrial Systems -
 ADLINK Centralized Motion Controllers PCI-8134
ADLINK Centralized Motion Controllers PCI-8134 -
 ADLINK cPCI-HR6847E/M2G-1 COMPACT PCI BOARD
ADLINK cPCI-HR6847E/M2G-1 COMPACT PCI BOARD -
 ADLINK PXIE-8638 BUS EXPANSION MODULE
ADLINK PXIE-8638 BUS EXPANSION MODULE -
 ADLINK cPCI-6910 6U CompactPCI 2.0 Blades
ADLINK cPCI-6910 6U CompactPCI 2.0 Blades -
 Adlink NuPRO-E42 51-41808-0A30 Industrial Motherboard
Adlink NuPRO-E42 51-41808-0A30 Industrial Motherboard -
 ADLINK IH61-AA400-A4A1E (IMB-M40H) Industrial Motherboard
ADLINK IH61-AA400-A4A1E (IMB-M40H) Industrial Motherboard -
 ADLINK PCIe-GIE64+ GigE Vision Frame Grabber Card
ADLINK PCIe-GIE64+ GigE Vision Frame Grabber Card -
 ADLINK MXC-6322D(G) Industrial Fanless Computer working
ADLINK MXC-6322D(G) Industrial Fanless Computer working



