
OMRON CJ1W-NCF71 Position Control Units
OMRON CJ1W-NCF71
Introducing a Position Control Unit that can control up to 16 axes across
a MECHATROLINK-II* high-speed field network. With it, every aspect of multi-axis
systems from machine design to future expansions can be changed quickly and simply
OMRON has developed a whole new environment that
seamlessly integrates different control devices and
networks over the entire life cycle of equipment and
machines, ranging from design and startup to operation
and maintenance. The system will still be viable as new
systems are developed and new control devices and
controllers become available. It all begins with OMRON
Standard Libraries.
OMRON Standard Libraries are software applications that customers can
load into their system and use without modification. The OMRON FB
Library and Smart Active Parts (SAPs) Library are available now. These
libraries simplify the software developed for interface components
between Programmable Controllers (PLCs) or Programmable Terminals
and various other control devices. They also improve the quality of the
software by using standardized software components.
The OMRON FB Library contains functional components for
Programmable Controllers (PLCs). These components can be used by
customers to produce finished programs that interface with various
control devices in much less time. Since the components are
standardized, they also improve the quality of the finished programs.
The Smart Active Parts (SAPs) Library, formerly known as the Device
Library, consists of screens with functions for Programmable Terminals.
SAPs can be used on screens developed by customers to produce
finished screens that interface with various control devices in much less
time. Since the components are standardized, they also improve screen
quality.
J1W-NCF71
CPU Bus Unit
CJ Series
0 to F
Words allocated in CPU Bus Unit Area: 25 words (15 output words, 10 input words)
Allocated in one of the following areas (user-specified): CIO, Work, Auxiliary, Holding, DM, or EM Area
Number of words allocated: 50 words (25 output words, 25 input words) x Highest axis number used
Specification Item
Common Operating Memory Area
Axis Operating Memory Area
Compatible devices
Model
Unit classification
Applicable PLCs
Unit number settings
I/O
allocations
Position commands
Speed commands for
position control
Servo lock/unlock
Position control
Establishing the origin
Jogging
Interrupt feeding
Speed control
Torque control
Stop functions
Acceleration/deceleration curves
Torque limit
Override
Servo parameter transfer
Monitoring function
Software limits
Backlash compensation
Position Control Unit
Servo Driver I/O
Self-diagnostic functions
Error detection functions
Internal current consumption
Dimensions

Weight
Ambient operating temperature
External I/O
Control
functions
Control
commands
Control method
Maximum number of controlled axes
Control commands executed using MECHATROLINK-II synchronous communications
16 axes–2.147.483.648 to 2.147.483.647 (command units) (The command unit depends on the Electronic Gear Settings in the Servo Parameter
Origin search: Establishes the origin using the specified search method.
Present position preset: Changes the present position to a specified position to establish the origin.
Origin return: Returns the axis from any position to the established origin.
Absolute encoder origin: Establishes the origin using a Servomotor that has an absolute encoder, without having to use an origin search.
Outputs pulses at a fixed speed in the CW or CCW direction.
Performs positioning by moving the axis a fixed amount when an external interrupt input is received while the axis is moving.
Performs speed control by sending a command to the Servo Driver speed loop.
Performs torque control by sending a command to the Servo Driver current loop.
Any of the following can be set: a trapezoidal (linear) curve, an exponential curve, or an S-curve (moving average).
Restricts the output torque during axis operation.
Multiplies the axis command speed by a specified ratio. Override: 0.01% to 327.67%
Reads and writes the Servo Driver parameters from the ladder program in the CPU Unit.
Monitors the control status of the Servo Driver, such as the command coordinate positions, feedback position, current speed, and torque.
Sets limits on the software level applied to the positioning range of axis operations.
Compensates for the amount of play in the mechanical system according to a set value.
One MECHATROLINK-II interface port
CW/CCW limit inputs, origin proximity inputs, external interrupt inputs 1 to 3 (can be used as external origin inputs)
Watchdog, flash memory check, memory corruption check
Overtravel, Servo Driver alarm detection, CPU error, MECHATROLINK communications error, Unit setting error
360 mA max. at 5 V DC
31 x 90 x 65 mm (W x H x D)
95 g max.
0 to 55°C
Deceleration stop: Decelerates the moving axis to a stop.
Emergency stop: Positions the moving axis for the number of pulses remainin
| User name | Member Level | Quantity | Specification | Purchase Date |
|---|



-
 OMRON H8PR-8/H8PR-8P H8PR-16/H8PR-16P H8PR-24/H8PR-24P Rotary Positioner
OMRON H8PR-8/H8PR-8P H8PR-16/H8PR-16P H8PR-24/H8PR-24P Rotary Positioner -
 ABB PFSA107-Z42 DTU Stressometer Digital Transmission Unit
ABB PFSA107-Z42 DTU Stressometer Digital Transmission Unit -
 Nidec Mentor MP
Nidec Mentor MP -
 IBA ibaNet-E
IBA ibaNet-E -
 IBA FO Connection to Reflective Memory
IBA FO Connection to Reflective Memory -
 IBA FO Connection to Siemens Systems
IBA FO Connection to Siemens Systems -
 IBA Interface Cards For Fiber Optic Connections
IBA Interface Cards For Fiber Optic Connections -
 IBA Field and Drive Buses
IBA Field and Drive Buses -
 IBA ibaPADU-S Modular System
IBA ibaPADU-S Modular System -
 IBA ibaMAQS
IBA ibaMAQS -
 STUCKE SYMAP®ARC
STUCKE SYMAP®ARC -
 STUCKE SYMAP®R
STUCKE SYMAP®R -
 STUCKE SYMAP®Compact
STUCKE SYMAP®Compact -
 MOOG G123-825-001 BUFFER AMPLIFIER
MOOG G123-825-001 BUFFER AMPLIFIER -
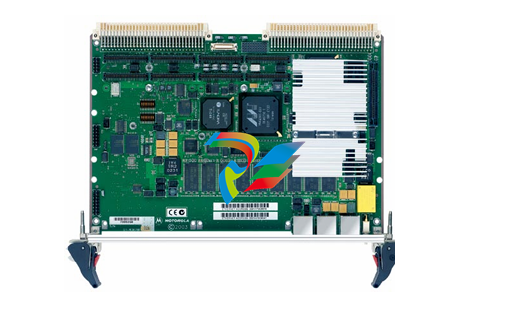
 Motorola MVME5100 Series VME Processor Modules
Motorola MVME5100 Series VME Processor Modules -
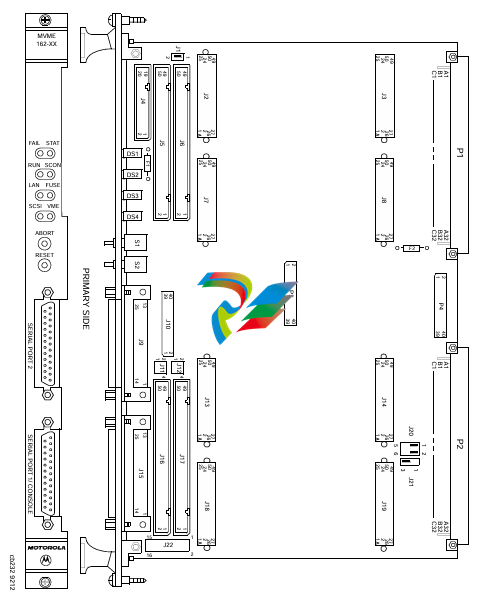 Motorola MVME162 Embedded Controller
Motorola MVME162 Embedded Controller -
 HIMatrix Safety-Related Controller System Manual for the Modular Systems
HIMatrix Safety-Related Controller System Manual for the Modular Systems -
 Motorola MVME2400 Series VME Processor Module
Motorola MVME2400 Series VME Processor Module -
 Sieger System 57
Sieger System 57 -
 KONGSBERG MRU product line continuation
KONGSBERG MRU product line continuation -
 Woodward easYgen-3100/3200 Genset Control for Multiple Unit Operation
Woodward easYgen-3100/3200 Genset Control for Multiple Unit Operation -
 Woodward MFR 300 Multifunction Relay / Measuring
Woodward MFR 300 Multifunction Relay / Measuring -
 ABB AX410, AX411, AX413, AX416, AX418, AX450, AX455 and AX456 Single and dual input analyzers for low level conductivity
ABB AX410, AX411, AX413, AX416, AX418, AX450, AX455 and AX456 Single and dual input analyzers for low level conductivity -
 ABB AX410, AX411, AX416, AX450 and AX455 Single and dual input analyzers
ABB AX410, AX411, AX416, AX450 and AX455 Single and dual input analyzers -
 Woodward easYgen-1400 Technical Manual Genset Control
Woodward easYgen-1400 Technical Manual Genset Control -
 Woodward easYgen-400 Operation Manual Genset Control
Woodward easYgen-400 Operation Manual Genset Control -
 Woodward High Output Digital Valve Positioner (DVP)DVP5000/DVP10000/DVP12000
Woodward High Output Digital Valve Positioner (DVP)DVP5000/DVP10000/DVP12000 -
 Woodward High Output Digital Valve Positioner DVP5000 and DVP10000
Woodward High Output Digital Valve Positioner DVP5000 and DVP10000 -
 Woodward TG611-13/-17 Overspeed Test Device Conversion Kit
Woodward TG611-13/-17 Overspeed Test Device Conversion Kit -
 Woodward MicroNet Safety Module (MSM)
Woodward MicroNet Safety Module (MSM) -
 Woodward 2301A Electronic Load Sharing and Speed Control 9905/9907 Series
Woodward 2301A Electronic Load Sharing and Speed Control 9905/9907 Series -
 Woodward-Service Bulletin 01671
Woodward-Service Bulletin 01671 -
 UniOP eTOP40B 12.1” TFT color display
UniOP eTOP40B 12.1” TFT color display -
 UniOP eTOP40 TFT Color display
UniOP eTOP40 TFT Color display -
 UniOP eTOP33B 10.4” TFT color display
UniOP eTOP33B 10.4” TFT color display -
 UniOP eTOP33C eTOP33-0050 Resistive touchscreen
UniOP eTOP33C eTOP33-0050 Resistive touchscreen -
UniOP eTOP30. eTOP32 eTOP32-0050 Human-machine interface equipment
-
 UniOP eTOP20B and eTOP21B eTOP20B-0050
UniOP eTOP20B and eTOP21B eTOP20B-0050 -
 UniOP eTOP12 eTOP12-0050 Advanced human-machine interface equipment
UniOP eTOP12 eTOP12-0050 Advanced human-machine interface equipment -
 UniOP eTOP11 eTOP11-0050 HMI
UniOP eTOP11 eTOP11-0050 HMI -
 UniOP eTOP06C HMI
UniOP eTOP06C HMI -
 UniOP eTOP06 HMI
UniOP eTOP06 HMI -
 UniOP eTOP05EB eTOP05EB-DF45 HMI
UniOP eTOP05EB eTOP05EB-DF45 HMI -
 UniOP eTOP05. eTOP05P Human-machine interface equipment
UniOP eTOP05. eTOP05P Human-machine interface equipment -
 UniOP eTOP03 eTOP03-0046
UniOP eTOP03 eTOP03-0046 -
 UniOP eTOP507 507U2P1 eTOP Series 500 Human-Machine Interface
UniOP eTOP507 507U2P1 eTOP Series 500 Human-Machine Interface -
 UniOP eTOP307
UniOP eTOP307 -
 UniOP ETT-VGA Human-machine interface touch unit
UniOP ETT-VGA Human-machine interface touch unit -
 UniOP ePAD32B, ePAD33B and ePAD33BT ePAD33B-0350
UniOP ePAD32B, ePAD33B and ePAD33BT ePAD33B-0350 -
 UniOP ePAD05 and ePAD06
UniOP ePAD05 and ePAD06 -
 UniOP CP02R-04 Human-machine interface
UniOP CP02R-04 Human-machine interface -
 UniOP ERT-16 - Industrial PLC Workstation
UniOP ERT-16 - Industrial PLC Workstation -
 UniOP ePAD03 and ePAD04
UniOP ePAD03 and ePAD04 -
 UNIOP EPALM10-DA71 state-of-the-art handheld HMI
UNIOP EPALM10-DA71 state-of-the-art handheld HMI -
 Watlow SERIES CLS200 SPECIFICATION SHEET
Watlow SERIES CLS200 SPECIFICATION SHEET -
 Detailed Explanation of B&R Power Panel 300/400: The Core of Industrial Automation Control
Detailed Explanation of B&R Power Panel 300/400: The Core of Industrial Automation Control -
 YOKOGAWA Models ANB10S, ANB10D, ANR10S, ANR10D Node Units (for FIO)
YOKOGAWA Models ANB10S, ANB10D, ANR10S, ANR10D Node Units (for FIO) -
 Woodward ESDR 4 Current Differential Protection Relay
Woodward ESDR 4 Current Differential Protection Relay -
 Woodward easYgen-3000 Genset Control for
Woodward easYgen-3000 Genset Control for -
 Woodward CPC-II Current-to-Pressure Converter
Woodward CPC-II Current-to-Pressure Converter -
 Woodward 8290-189-EPG-installation-manual 8290-044
Woodward 8290-189-EPG-installation-manual 8290-044 -
 Woodward Product Change Notification 06946A
Woodward Product Change Notification 06946A -
 Woodward Product Change Notification 06912
Woodward Product Change Notification 06912 -
 Fisher™ 4660 High-Low Pressure Pilot
Fisher™ 4660 High-Low Pressure Pilot -
 Flexible digital protection and control equipment SYMAP®
Flexible digital protection and control equipment SYMAP® -
 Woodward 723PLUS Digital Control
Woodward 723PLUS Digital Control -
 Woodward 505 Digital Controller For steam turbineses
Woodward 505 Digital Controller For steam turbineses -
 Woodward 85018V2 505E Digital Governor for Extraction Steam Turbines
Woodward 85018V2 505E Digital Governor for Extraction Steam Turbines -
Woodward 85018V1 Turbine Control Parameters
-
Woodward 26871 505 Enhanced Digital Control for Steam Turbines
-
 Woodward 03365 505E (Extraction / Admission)
Woodward 03365 505E (Extraction / Admission) -
 KONGSBERG RMP420-Remote Multipurpose Input/Output
KONGSBERG RMP420-Remote Multipurpose Input/Output -
 KONGSBERG RCU501 Remote Controller Unit
KONGSBERG RCU501 Remote Controller Unit -
 KONGSBERG RCU500 Remote Controller Unit
KONGSBERG RCU500 Remote Controller Unit -
 K-Gauge TOP KONGSBERG Tank Overfill Protection SystemFeatures
K-Gauge TOP KONGSBERG Tank Overfill Protection SystemFeatures -
 Kongsberg DPS112 DGNSS (DGPS/DGLONASS) sensor
Kongsberg DPS112 DGNSS (DGPS/DGLONASS) sensor -
 Kongsberg d0000930-presafe-atex-report signed
Kongsberg d0000930-presafe-atex-report signed -
 HIMax TECHNICAL FACTS X Series
HIMax TECHNICAL FACTS X Series -
 GE Multilin F650
GE Multilin F650 -
 GE MIF II - Legacy
GE MIF II - Legacy -
 GE PQM II Power QualIty Meter
GE PQM II Power QualIty Meter -
 Hydran 201Ti Mark IV Essential DGA monitoring for transformers
Hydran 201Ti Mark IV Essential DGA monitoring for transformers -
 alstom AMS42/84 5B Amplifier SystemAmplifier Technology at its Best.
alstom AMS42/84 5B Amplifier SystemAmplifier Technology at its Best. -
 GE VMIVME-5576 Fiber-Optic Reflective Memory with Interrupts
GE VMIVME-5576 Fiber-Optic Reflective Memory with Interrupts -
 GE Multilin 750/760 - Legacy Feeder Protection System
GE Multilin 750/760 - Legacy Feeder Protection System -
 GE Fanuc Automation VMICPCI-7806 Specifications
GE Fanuc Automation VMICPCI-7806 Specifications -
 VMIVME-7807 VME-7807RC* Intel® Pentium® M-Based VME SBC
VMIVME-7807 VME-7807RC* Intel® Pentium® M-Based VME SBC -
 GE Fanuc Automation VMIVME-7750 Specifications
GE Fanuc Automation VMIVME-7750 Specifications -
 FOXBORO Compact FBM240. Redundant with Readback, Discrete
FOXBORO Compact FBM240. Redundant with Readback, Discrete -
 FOXBORO FBM208/b, Redundant with Readback, 0 to 20 mA I/O Module
FOXBORO FBM208/b, Redundant with Readback, 0 to 20 mA I/O Module -
 FOXBORO FBM201e Analog Input (0 to 20 mA) Interface Modules
FOXBORO FBM201e Analog Input (0 to 20 mA) Interface Modules -
 Foxboro DCS FBM206 Pulse Input Module
Foxboro DCS FBM206 Pulse Input Module -
 FOXBORO FBM216 HART® Communication Redundant Input Interface Module
FOXBORO FBM216 HART® Communication Redundant Input Interface Module -
 FOXBORO Z-Module Control Processor 270 (ZCP270)
FOXBORO Z-Module Control Processor 270 (ZCP270) -
 FOXBORO Fieldbus Communications Module, FCM10Ef
FOXBORO Fieldbus Communications Module, FCM10Ef -
 FOXBORO Fieldbus Communications Module, FCM10E
FOXBORO Fieldbus Communications Module, FCM10E -
 Foxboro DCS Compact FBM241/c/d, Redundant, Discrete I/O Modules
Foxboro DCS Compact FBM241/c/d, Redundant, Discrete I/O Modules -
Foxboro FBM223 PROFIBUS-DP™ Communication Interface Module
-
 Foxboro DCS FBM204. 0 to 20 mAI/OModule
Foxboro DCS FBM204. 0 to 20 mAI/OModule -
Foxboro FBM239, Discrete 16DI/16DO Module
-
Foxboro FBM202 Thermocouple/mV Input Module
-
 Foxboro E69F Current-to-Pneumatic Signal Converter
Foxboro E69F Current-to-Pneumatic Signal Converter -
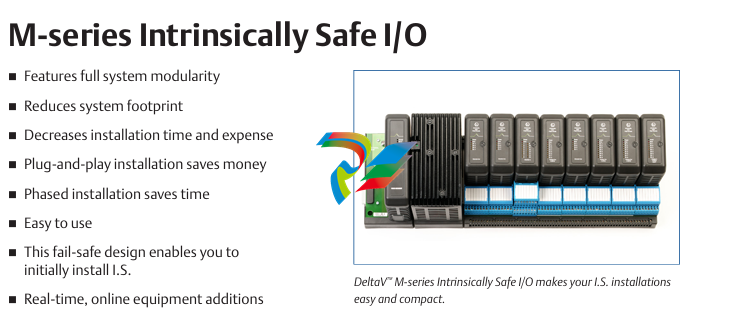 EMERSON M-series Intrinsically Safe I/O
EMERSON M-series Intrinsically Safe I/O -
 MVME6100 Series VMEbus Single-Board Computer
MVME6100 Series VMEbus Single-Board Computer -
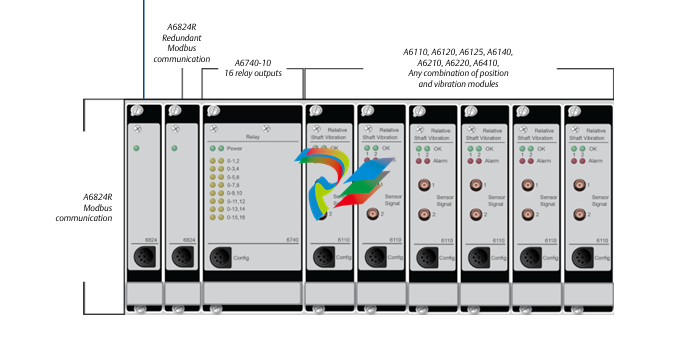 Configuration for AMS 6500 Protection Monitors
Configuration for AMS 6500 Protection Monitors -
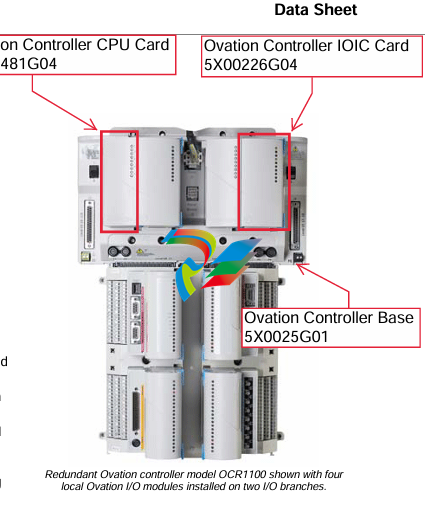 Ovation™ Controller Model OCR1100 (5X00481G04/5X00226G04)
Ovation™ Controller Model OCR1100 (5X00481G04/5X00226G04) -
 ABB UCU-22, UCU-23 andUCU-24control units
ABB UCU-22, UCU-23 andUCU-24control units -
 ABB force measurement
ABB force measurement -
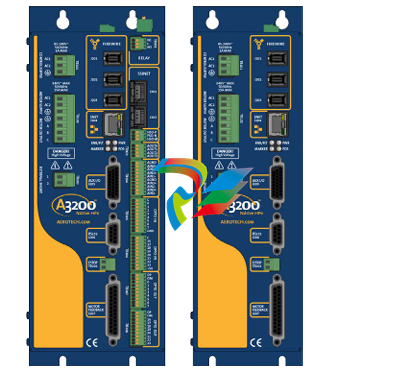
 AEROTECH Ndrive MP Hardware Manual
AEROTECH Ndrive MP Hardware Manual -
 AEROTECH Ndrive HPe 10/20/30
AEROTECH Ndrive HPe 10/20/30 -
 AEROTECH Ndrive CP Hardware Manual
AEROTECH Ndrive CP Hardware Manual -
 AEROTECH Ndrive Linear Series Digital Servo Amplifiers – Linear
AEROTECH Ndrive Linear Series Digital Servo Amplifiers – Linear -
 AEROTECH Ndrive HP 10/20/30 P/N: EDU170
AEROTECH Ndrive HP 10/20/30 P/N: EDU170 -
 AEROTECH EDU176_Ndrive_HL
AEROTECH EDU176_Ndrive_HL -
 ADVANCEDMOTION CONTROLS Analog Servo Drive 120A10
ADVANCEDMOTION CONTROLS Analog Servo Drive 120A10 -
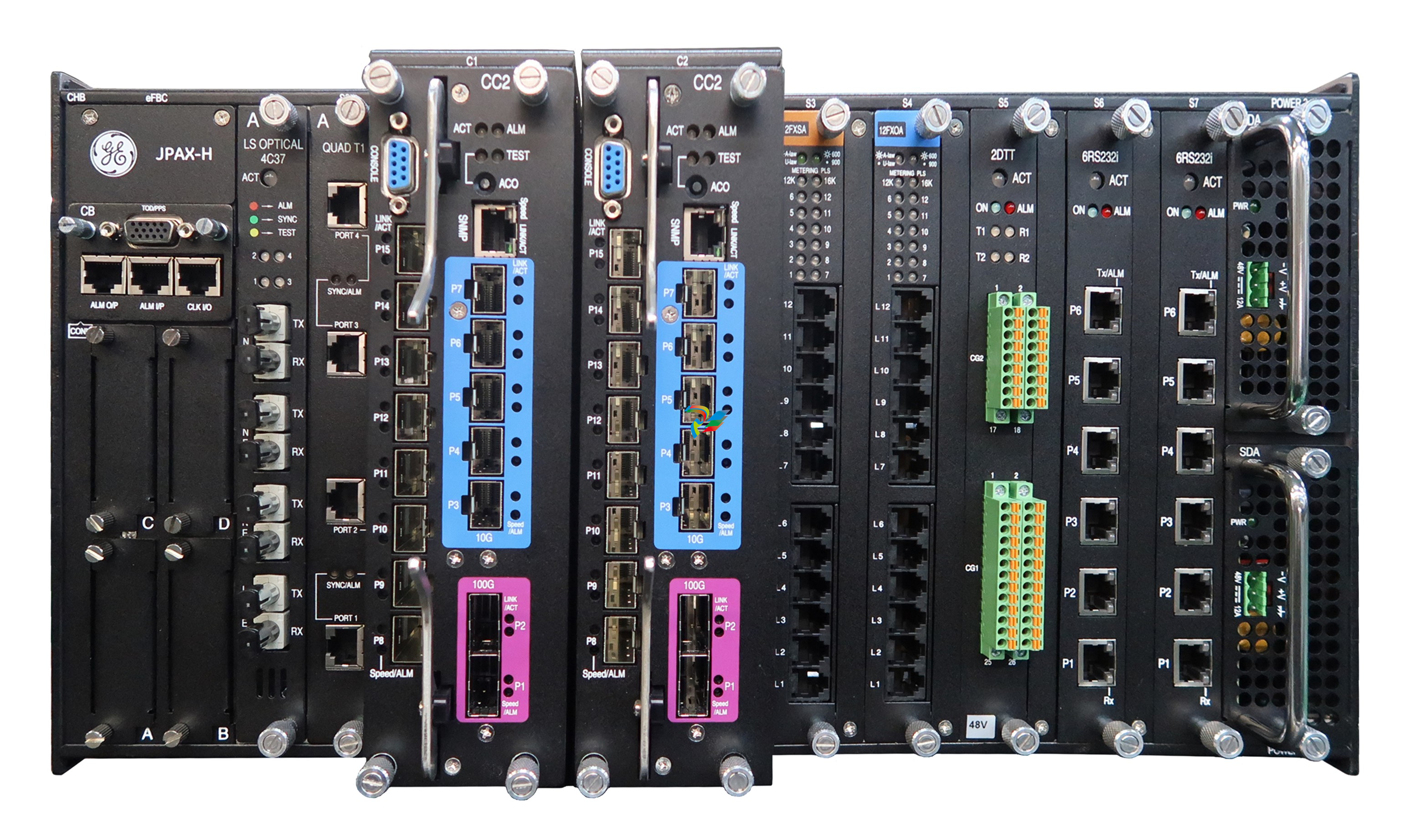 GE JPAX-H
GE JPAX-H -
 GE JPAX family
GE JPAX family -
 GE Industry Leading Experience
GE Industry Leading Experience -
 GE Ether-1000 Unit
GE Ether-1000 Unit -
 GE Cyber Secured Service Unit
GE Cyber Secured Service Unit -
 GE Lentronics E1MXe Multiplexer
GE Lentronics E1MXe Multiplexer -
 GE TTMX Teleprotection Terminal
GE TTMX Teleprotection Terminal -
 GE Lentronics T1 Multiplexer
GE Lentronics T1 Multiplexer -
 GE Lentronics JungleMUX SONET Multiplexer
GE Lentronics JungleMUX SONET Multiplexer -
 GE Lentronics E1MX Multiplexer
GE Lentronics E1MX Multiplexer -
GE Lentronics TN1Ue SDH Multiplexer
-
 GE Lentronics TN1U SDH Multiplexer
GE Lentronics TN1U SDH Multiplexer -
 GE Gridcom DXC Family Access and Transmission Multiplexer
GE Gridcom DXC Family Access and Transmission Multiplexer


