
OMRON CJ1W-MCH71 - MECHATROLINK-II
CJ1W-MCH71 - MECHATROLINK-II
Motion control unit
Multi-axes motion control via high-speed
MECHATROLINK-II
• Up to 30 axes controlled with minimum wiring
• High-speed bus MECHATROLINK-II is specially
designed for motion control
• Supports position, speed and torque control
• Electronic CAM profiles and axes synchronization
• Hardware registration input for every axis
• Program control commands, like multi-task, parallel
programming and various arithmetic operations for
maximum program efficiency
• Smart active parts for OMRON HMIs
• Access to the complete system from one point
Function
Multi-axes control is made easy by freely combining control axes. Up to 32 axes can be used, including 30 physical axes and two virtual axes, and
each axis can be set individually. Position control, synchronized control (electronic gear, electronic cam, follow-up), speed control, and torque
control are all supported, enabling a wide range of applications. By using the high-speed servo communications MECHATROLINK-II, motion pro
grams, system parameters, system data, and servo drive parameters can be set and read from the software tool.
Specifications
Motion control unit
Model CJ1W-MCH71
Classification CJ-series CPU bus unit
Applicable PLCs CJ-series V. 2.0 or later
Control method MECHATROLINK-II (position, speed and torque control)
Controlled devices Sigma-II series servo drives (ver. 38 or later) with MECHATROLINK-II interface, various I/O units and inverters V7.
F7. G7 with MECHATROLINK-II interface (for inverter version support contact your OMRON sales office)
Programming language BASIC type motion control language
Controlled axes 32 max, including 30 physical or virtual axes and 2 virtual axes
Automatic/manual mode Automatic mode: mode for executing programs in the unit
Manual Mode: mode for executing commands from the CPU unit (via allocated words)
Minimum setting unit 1. 0.1. 0.01. 0.001. 0.0001 (unit: mm, inch, degree, pulse)
Maximum command value-2.147.483.648 to 2.147.483.647 pulses (32 bits with sign); infinite axis feed mode supported.
Example: 16.384 pulses/rev after multiplication, a minimum setting unit of 0.001 mm and 1 mm/rev would result
in -1.310.720.000 to 1.310.719.999 command units.
Control functions by
command from
CPU unit
Servo lock/unlock Locks and unlocks the servo driver.
Jogging Executes continuous feeding for each axis independently at selectable speed.
Origin search Determines the machine origin in the direction set in the system parameters.
Can be executed with an absolute encoder.
Absolute origin settingSets the origin for when an absolute encoder is used. (Offset value: 32 bits [pulses] with sign)
Machine lock Stops the output of move commands to axes.
Single block Executes motion programs one block at a time.
Control functions by
motion program
Positioning (PTP) Executes positioning independently for each axis at a specified speed or the speed system parameter.
(Simultaneous specification: up to eight axes/block, simultaneous execution: up to 32 blocks/unit)
Linear interpolation Executes linear interpolation for up to eight axes at a time at the specified interpolation feed speed.
(Simultaneous specification: up to eight axes/block, simultaneous execution: up to 32 blocks/system)
Circular interpolation Executes circular interpolation for two axes in either clockwise or counterclockwise at the specified interpolation
feed speed. Helical circular interpolation is also possible with single-axis linear interpolation added.
(Simultaneous specification: two or three axes/block, simultaneous execution: up to 16 blocks/system)
Other functions Origin searches, interrupt feeding, timed positioning, traverse positioning, independent electronic CAM, synchronized
electronic CAM, link operation, electronic gear, follow-up synchronization, speed reference, torque reference
Acceleration/deceleration curve,
acceleration/deceleration time
Trapezoidal or S-curve, 60.000 ms max. (S-curve: constant 30.000 ms max.)
External I/O One port for MECHATROLINK-II servo communications, one deceleration stop input, two general inputs,
two general outputs
Feed rate Rapid, interpolation feed rate: 1 to 2.147.483.647 (command units/min)
Override 0.00% to 327.67% (setting unit: 0.01%; Can be set for each axis or task.)
Motion programs Number of tasks,
number of programs
Up to 8 tasks and 256 programs/unit (8 parallel branches per task max.)
Program numbers 0000 to 0499 for main program; 0500 to 0999 for subroutine
Program capacity In motion program conversion, 8.000 blocks/unit max. (2 Mbytes); number of blocks: 800 per program
Data capacity Position data: 10.240 points/unit; cam data: 32 max.; 16.000 points/unit
Subroutine nesting Five levels max.
Start Programs in other tasks can be started from a program or from the PLC
Deceleration stop Decelerates to a stop regardless of the block.
Block stop Decelerates to a stop after the block being executed is ended.
Single block Executes the program one block at a time.
Data exchange
with CPU unit
Unit BIT area Uses one unit number (25 words). Used for unit and tasks: 11 to 25 words (depending on the number of tasks)
Unit data area Uses one unit number (100 words). Used for unit and tasks: 32 to 74 words (depending on the number of tasks)
Axes BIT area Axes: 0 to 64 words (depending on the maximum axis number used). User configurable.
Axes data area Axes: 0 to 128 words (depending on the maximum axis number used). User configurable.
General purpose General I/O: 0 to 1.280 words (depending on the settings). User configurable.
Saving programs and data Memory card backup (in CPU unit, 100.000 times max.)
Self-diagnostic functions Watchdog, RAM check, etc.
Error detection functions Deceleration stop inputs, unit number errors, CPU errors, software limit errors, etc.
Error log function Read by IORD instruction from CPU unit.
Support software Microsoft Windows 2000 or NT 4.0 (Processor: Pentium, 100 MHz min., with at least 64 MB of memory)
External power supply voltage 24 VDC (21.6 to 26.4 VDC)
Internal current consumption 0.6 A or less for 5 VDC
Weight (not including connectors) 300 g m
MECHATROLINK-II, Servo drive interface unit (JUSP-NS115)
MECHATROLINK-II, 64 Point I/O module (IO2310)
MECHATROLINK-II, counter module (PL2900)
MECHATROLINK-II, pulse output module (PL2910)
Item Details
Type JUSP-NS115
Applicable servo drive SGDH-@@@E models (version 38 or later)
Installation Method Mounted on the SGDH servo drive side: CN10.
Basic
specifications
Power supply method Supplied from the servo drive control power supply.
Power consumption 2 W
MECHATROLINK -II
communications
Baud rate/transmission cycle 10 Mbps / 1 ms or more. MECHATROLINK-II communications
Command format Operation specification Positioning using MECHATROLINK-I/II communications.
Reference input MECHATROLINK-I/II communications
Commands: position, speed, torque, parameter read/write,
monitor output
Position control

Acceleration/deceleration methodLinear first/second-step, asymmetric, exponential, S-curve
Fully closed control Position control with fully closed feedback is possible.
Fully closed
system specifications
Encoder pulse output in the
servo drive
5 V differential line-driver output (complies with EIA standard RS-422A)
Fully closed encoder pulse signal A quad B line-driver
Maximum receivable frequency
for servo drive
1 Mpps
Power supply for fully closed
encoder
To be prepared by customer.
Input signals in the
servo drive
Signal allocation changes
possible
Forward/reverse run prohibited, zero point return deceleration LS
External latch signals 1. 2. 3
Forward/reverse torque control
Internal functions Position data latch function Position data latching is possible using phase C,
and external signals 1. 2. 3
Protection Parameters damage, parameter setting errors, communications errors,
WDT errors, fully closed encoder detecting disconnection
LED indicators A: alarm, R: MECHATROLINK-I/II communicating
Items Specifications Appearance
Model JEPMC-IO2310
I/O signals Input: 64 points, 24 VDC, 5mA, sink/source mode input
Output: 64 points, 24 VDC, 50mA when all points ON,(the max. rating is 100mA per point)
sink mode output (NPN)
Signal connection method: connector (FCN360 series)
Module power supply 24VDC (20.4 V to 28.8 V)
Rated current: 0.5 A
Inrush current: 1 A
Weight 590 g
Items Specifications Appearance
Model JEPMC-PL2900
Number of input
channels
2 (1 can be used with MCH)
Functions Pulse counter, notch output
Pulse input method Sign (1/2 multipliers), A/B (1/2/4 multipliers), UP/DOWN (1/2 multipliers)
Max. counter speed 1200 kpps (x 4 multiplier)
Pulse input voltage 3/5/12/24 VDC
External power supply 24VDC, 120mA or less
Weight 300 g
Items Specifications Appearance
Model JEPMC-PL2910
Number of output
channels 2
Functions Pulse positioning, JOG run, zero-point return
Pulse output method CW, CCW pulse, sign
Max. output speed 500 kpps
Pulse output voltage 5 VDC
Pulse interface circuit Open collector output
5VDC, 10mA/circuit
External control signal Digital input: 8 points/module, 5 VDC x 4 points, 24 VDC x 4 points
Digital output: 6 points/module, 5 VDC x 4 points, 24 VDC x 2 points
Weight 300 g
NS115
44 Motion controllers
MECHATROLINK-II Repeater
MECHATROLINK-II, frequency inverter interface units
Nomenclature
CJ1W-MCH71 - motion control unit
JUSP-NS115 - MECHATROLINK-II interface unit
Items Specifications Appearance
Model JEPMC-REP2000
Communication type MECHATROLINK-II
Cable length Between controller and repeater: 50m., after repeater: 50m
Max. connected
stations
Total stations on both sides of repeater: 30
(limited to the max. number of connectable stations of the controller (e.g., 30 stations for the CJ1W-MCH71))
Restrictions Between controller and repeater- Total cable length ≤ 30m: 15 stations max.
including I/O and servo, etc.- 30 m < total cable length ≤ 50m: 14 stations max. including I/O and servo, etc.
After repeater:- Total cable length ≤ 30m: 16 stations max. including I/O and servo, etc.- 30 m < total cable length ≤ 50m: 15 stations max. including I/O and servo, etc.
Power supply 24 VDC, 100 mA
Weight 340 g
Dimensions (mm) 30x160x77 (HxWxD)
Item Details
Type SI-T/V7 SI-T
Applicable inverter CIMR-V7 / 3G3-MV
(firmware 5740 or newer)
CIMR-G7 / CIMR-F7
(firmware 656x/for G7 / 4011 or newer for F7)
Contact your OMRON sales office for information about firmware compatibility
Installation method Mounted on the inverter
Power supply Supplied from the inverter
MECHATROLINK-II communications 10 MHz, 0.5 ms to 8 ms for MECHATROLINK-II
Operation Read and write registers, read monitors, inverter operation, speed reference, torque reference
(G7/F7 only).
Inputs and outputs The inputs and outputs in the inverter can be read and set by the MLII master
Connectors ML-II bus connector. DPRAM connector for the inverter
Switches Rotary switch for ML-II address (low byte)
Dip switch for: ML-II address (high bit). ML-II/ML-I selection. 17 byte/32 byte data length selection.
| User name | Member Level | Quantity | Specification | Purchase Date |
|---|



-
 OMRON H8PR-8/H8PR-8P H8PR-16/H8PR-16P H8PR-24/H8PR-24P Rotary Positioner
OMRON H8PR-8/H8PR-8P H8PR-16/H8PR-16P H8PR-24/H8PR-24P Rotary Positioner -
 ABB PFSA107-Z42 DTU Stressometer Digital Transmission Unit
ABB PFSA107-Z42 DTU Stressometer Digital Transmission Unit -
 Nidec Mentor MP
Nidec Mentor MP -
 IBA ibaNet-E
IBA ibaNet-E -
 IBA FO Connection to Reflective Memory
IBA FO Connection to Reflective Memory -
 IBA FO Connection to Siemens Systems
IBA FO Connection to Siemens Systems -
 IBA Interface Cards For Fiber Optic Connections
IBA Interface Cards For Fiber Optic Connections -
 IBA Field and Drive Buses
IBA Field and Drive Buses -
 IBA ibaPADU-S Modular System
IBA ibaPADU-S Modular System -
 IBA ibaMAQS
IBA ibaMAQS -
 STUCKE SYMAP®ARC
STUCKE SYMAP®ARC -
 STUCKE SYMAP®R
STUCKE SYMAP®R -
 STUCKE SYMAP®Compact
STUCKE SYMAP®Compact -
 MOOG G123-825-001 BUFFER AMPLIFIER
MOOG G123-825-001 BUFFER AMPLIFIER -
 Motorola MVME5100 Series VME Processor Modules
Motorola MVME5100 Series VME Processor Modules -
 Motorola MVME162 Embedded Controller
Motorola MVME162 Embedded Controller -
 HIMatrix Safety-Related Controller System Manual for the Modular Systems
HIMatrix Safety-Related Controller System Manual for the Modular Systems -
 Motorola MVME2400 Series VME Processor Module
Motorola MVME2400 Series VME Processor Module -
 Sieger System 57
Sieger System 57 -
 KONGSBERG MRU product line continuation
KONGSBERG MRU product line continuation -
 Woodward easYgen-3100/3200 Genset Control for Multiple Unit Operation
Woodward easYgen-3100/3200 Genset Control for Multiple Unit Operation -
 Woodward MFR 300 Multifunction Relay / Measuring
Woodward MFR 300 Multifunction Relay / Measuring -
 ABB AX410, AX411, AX413, AX416, AX418, AX450, AX455 and AX456 Single and dual input analyzers for low level conductivity
ABB AX410, AX411, AX413, AX416, AX418, AX450, AX455 and AX456 Single and dual input analyzers for low level conductivity -
 ABB AX410, AX411, AX416, AX450 and AX455 Single and dual input analyzers
ABB AX410, AX411, AX416, AX450 and AX455 Single and dual input analyzers -
 Woodward easYgen-1400 Technical Manual Genset Control
Woodward easYgen-1400 Technical Manual Genset Control -
 Woodward easYgen-400 Operation Manual Genset Control
Woodward easYgen-400 Operation Manual Genset Control -
 Woodward High Output Digital Valve Positioner (DVP)DVP5000/DVP10000/DVP12000
Woodward High Output Digital Valve Positioner (DVP)DVP5000/DVP10000/DVP12000 -
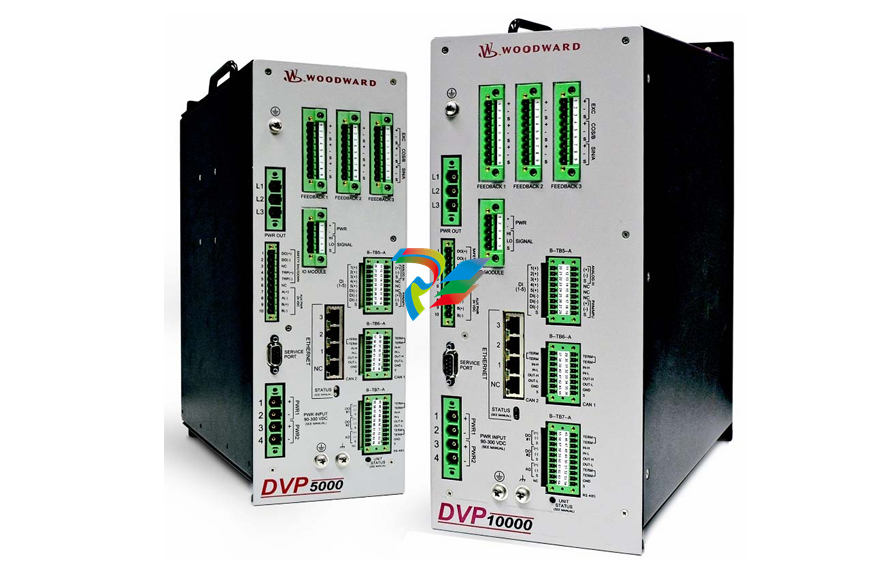 Woodward High Output Digital Valve Positioner DVP5000 and DVP10000
Woodward High Output Digital Valve Positioner DVP5000 and DVP10000 -
 Woodward TG611-13/-17 Overspeed Test Device Conversion Kit
Woodward TG611-13/-17 Overspeed Test Device Conversion Kit -
 Woodward MicroNet Safety Module (MSM)
Woodward MicroNet Safety Module (MSM) -
 Woodward 2301A Electronic Load Sharing and Speed Control 9905/9907 Series
Woodward 2301A Electronic Load Sharing and Speed Control 9905/9907 Series -
 Woodward-Service Bulletin 01671
Woodward-Service Bulletin 01671 -
 UniOP eTOP40B 12.1” TFT color display
UniOP eTOP40B 12.1” TFT color display -
 UniOP eTOP40 TFT Color display
UniOP eTOP40 TFT Color display -
 UniOP eTOP33B 10.4” TFT color display
UniOP eTOP33B 10.4” TFT color display -
 UniOP eTOP33C eTOP33-0050 Resistive touchscreen
UniOP eTOP33C eTOP33-0050 Resistive touchscreen -
UniOP eTOP30. eTOP32 eTOP32-0050 Human-machine interface equipment
-
 UniOP eTOP20B and eTOP21B eTOP20B-0050
UniOP eTOP20B and eTOP21B eTOP20B-0050 -
 UniOP eTOP12 eTOP12-0050 Advanced human-machine interface equipment
UniOP eTOP12 eTOP12-0050 Advanced human-machine interface equipment -
 UniOP eTOP11 eTOP11-0050 HMI
UniOP eTOP11 eTOP11-0050 HMI -
 UniOP eTOP06C HMI
UniOP eTOP06C HMI -
 UniOP eTOP06 HMI
UniOP eTOP06 HMI -
 UniOP eTOP05EB eTOP05EB-DF45 HMI
UniOP eTOP05EB eTOP05EB-DF45 HMI -
 UniOP eTOP05. eTOP05P Human-machine interface equipment
UniOP eTOP05. eTOP05P Human-machine interface equipment -
 UniOP eTOP03 eTOP03-0046
UniOP eTOP03 eTOP03-0046 -
 UniOP eTOP507 507U2P1 eTOP Series 500 Human-Machine Interface
UniOP eTOP507 507U2P1 eTOP Series 500 Human-Machine Interface -
 UniOP eTOP307
UniOP eTOP307 -
 UniOP ETT-VGA Human-machine interface touch unit
UniOP ETT-VGA Human-machine interface touch unit -
 UniOP ePAD32B, ePAD33B and ePAD33BT ePAD33B-0350
UniOP ePAD32B, ePAD33B and ePAD33BT ePAD33B-0350 -
 UniOP ePAD05 and ePAD06
UniOP ePAD05 and ePAD06 -
 UniOP CP02R-04 Human-machine interface
UniOP CP02R-04 Human-machine interface -
 UniOP ERT-16 - Industrial PLC Workstation
UniOP ERT-16 - Industrial PLC Workstation -
 UniOP ePAD03 and ePAD04
UniOP ePAD03 and ePAD04 -
 UNIOP EPALM10-DA71 state-of-the-art handheld HMI
UNIOP EPALM10-DA71 state-of-the-art handheld HMI -
 Watlow SERIES CLS200 SPECIFICATION SHEET
Watlow SERIES CLS200 SPECIFICATION SHEET -
 Detailed Explanation of B&R Power Panel 300/400: The Core of Industrial Automation Control
Detailed Explanation of B&R Power Panel 300/400: The Core of Industrial Automation Control -
 YOKOGAWA Models ANB10S, ANB10D, ANR10S, ANR10D Node Units (for FIO)
YOKOGAWA Models ANB10S, ANB10D, ANR10S, ANR10D Node Units (for FIO) -
 Woodward ESDR 4 Current Differential Protection Relay
Woodward ESDR 4 Current Differential Protection Relay -
 Woodward easYgen-3000 Genset Control for
Woodward easYgen-3000 Genset Control for -
 Woodward CPC-II Current-to-Pressure Converter
Woodward CPC-II Current-to-Pressure Converter -
 Woodward 8290-189-EPG-installation-manual 8290-044
Woodward 8290-189-EPG-installation-manual 8290-044 -
 Woodward Product Change Notification 06946A
Woodward Product Change Notification 06946A -
 Woodward Product Change Notification 06912
Woodward Product Change Notification 06912 -
 Fisher™ 4660 High-Low Pressure Pilot
Fisher™ 4660 High-Low Pressure Pilot -
 Flexible digital protection and control equipment SYMAP®
Flexible digital protection and control equipment SYMAP® -
 Woodward 723PLUS Digital Control
Woodward 723PLUS Digital Control -
 Woodward 505 Digital Controller For steam turbineses
Woodward 505 Digital Controller For steam turbineses -
 Woodward 85018V2 505E Digital Governor for Extraction Steam Turbines
Woodward 85018V2 505E Digital Governor for Extraction Steam Turbines -
Woodward 85018V1 Turbine Control Parameters
-
Woodward 26871 505 Enhanced Digital Control for Steam Turbines
-
 Woodward 03365 505E (Extraction / Admission)
Woodward 03365 505E (Extraction / Admission) -
 KONGSBERG RMP420-Remote Multipurpose Input/Output
KONGSBERG RMP420-Remote Multipurpose Input/Output -
 KONGSBERG RCU501 Remote Controller Unit
KONGSBERG RCU501 Remote Controller Unit -
 KONGSBERG RCU500 Remote Controller Unit
KONGSBERG RCU500 Remote Controller Unit -
 K-Gauge TOP KONGSBERG Tank Overfill Protection SystemFeatures
K-Gauge TOP KONGSBERG Tank Overfill Protection SystemFeatures -
 Kongsberg DPS112 DGNSS (DGPS/DGLONASS) sensor
Kongsberg DPS112 DGNSS (DGPS/DGLONASS) sensor -
 Kongsberg d0000930-presafe-atex-report signed
Kongsberg d0000930-presafe-atex-report signed -
 HIMax TECHNICAL FACTS X Series
HIMax TECHNICAL FACTS X Series -
 GE Multilin F650
GE Multilin F650 -
 GE MIF II - Legacy
GE MIF II - Legacy -
 GE PQM II Power QualIty Meter
GE PQM II Power QualIty Meter -
 Hydran 201Ti Mark IV Essential DGA monitoring for transformers
Hydran 201Ti Mark IV Essential DGA monitoring for transformers -
 alstom AMS42/84 5B Amplifier SystemAmplifier Technology at its Best.
alstom AMS42/84 5B Amplifier SystemAmplifier Technology at its Best. -
 GE VMIVME-5576 Fiber-Optic Reflective Memory with Interrupts
GE VMIVME-5576 Fiber-Optic Reflective Memory with Interrupts -
 GE Multilin 750/760 - Legacy Feeder Protection System
GE Multilin 750/760 - Legacy Feeder Protection System -
 GE Fanuc Automation VMICPCI-7806 Specifications
GE Fanuc Automation VMICPCI-7806 Specifications -
 VMIVME-7807 VME-7807RC* Intel® Pentium® M-Based VME SBC
VMIVME-7807 VME-7807RC* Intel® Pentium® M-Based VME SBC -
 GE Fanuc Automation VMIVME-7750 Specifications
GE Fanuc Automation VMIVME-7750 Specifications -
 FOXBORO Compact FBM240. Redundant with Readback, Discrete
FOXBORO Compact FBM240. Redundant with Readback, Discrete -
 FOXBORO FBM208/b, Redundant with Readback, 0 to 20 mA I/O Module
FOXBORO FBM208/b, Redundant with Readback, 0 to 20 mA I/O Module -
 FOXBORO FBM201e Analog Input (0 to 20 mA) Interface Modules
FOXBORO FBM201e Analog Input (0 to 20 mA) Interface Modules -
 Foxboro DCS FBM206 Pulse Input Module
Foxboro DCS FBM206 Pulse Input Module -
 FOXBORO FBM216 HART® Communication Redundant Input Interface Module
FOXBORO FBM216 HART® Communication Redundant Input Interface Module -
 FOXBORO Z-Module Control Processor 270 (ZCP270)
FOXBORO Z-Module Control Processor 270 (ZCP270) -
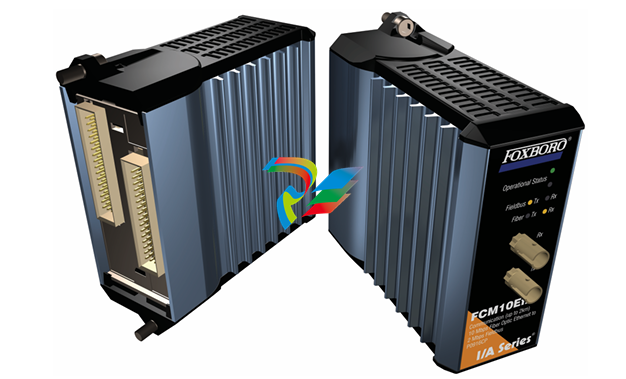 FOXBORO Fieldbus Communications Module, FCM10Ef
FOXBORO Fieldbus Communications Module, FCM10Ef -
 FOXBORO Fieldbus Communications Module, FCM10E
FOXBORO Fieldbus Communications Module, FCM10E -
 Foxboro DCS Compact FBM241/c/d, Redundant, Discrete I/O Modules
Foxboro DCS Compact FBM241/c/d, Redundant, Discrete I/O Modules -
Foxboro FBM223 PROFIBUS-DP™ Communication Interface Module
-
 Foxboro DCS FBM204. 0 to 20 mAI/OModule
Foxboro DCS FBM204. 0 to 20 mAI/OModule -
Foxboro FBM239, Discrete 16DI/16DO Module
-
Foxboro FBM202 Thermocouple/mV Input Module
-
 Foxboro E69F Current-to-Pneumatic Signal Converter
Foxboro E69F Current-to-Pneumatic Signal Converter -
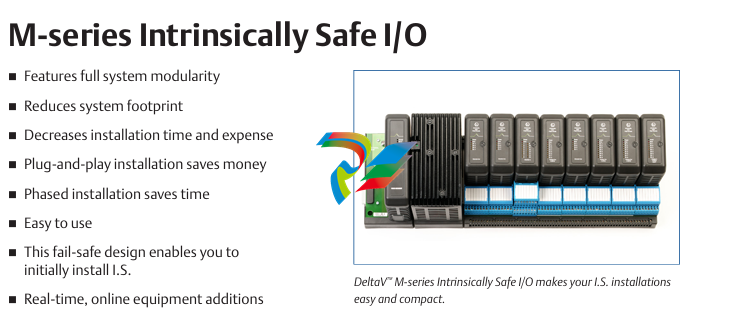 EMERSON M-series Intrinsically Safe I/O
EMERSON M-series Intrinsically Safe I/O -
 MVME6100 Series VMEbus Single-Board Computer
MVME6100 Series VMEbus Single-Board Computer -
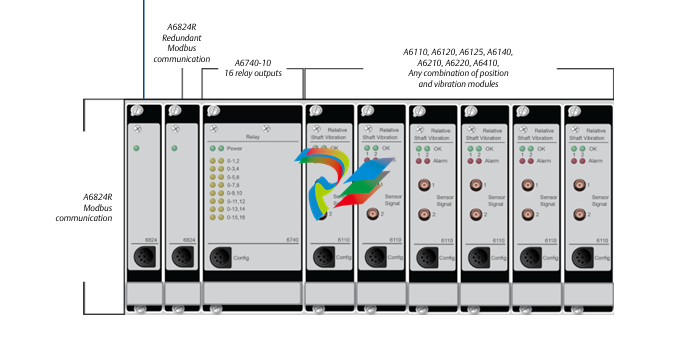 Configuration for AMS 6500 Protection Monitors
Configuration for AMS 6500 Protection Monitors -
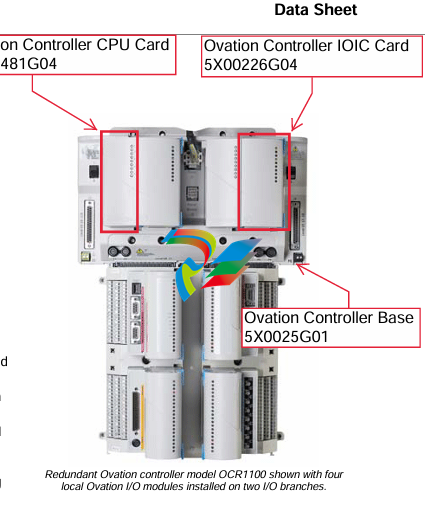 Ovation™ Controller Model OCR1100 (5X00481G04/5X00226G04)
Ovation™ Controller Model OCR1100 (5X00481G04/5X00226G04) -
 ABB UCU-22, UCU-23 andUCU-24control units
ABB UCU-22, UCU-23 andUCU-24control units -
 ABB force measurement
ABB force measurement -
 AEROTECH Ndrive MP Hardware Manual
AEROTECH Ndrive MP Hardware Manual -
 AEROTECH Ndrive HPe 10/20/30
AEROTECH Ndrive HPe 10/20/30 -
 AEROTECH Ndrive CP Hardware Manual
AEROTECH Ndrive CP Hardware Manual -
 AEROTECH Ndrive Linear Series Digital Servo Amplifiers – Linear
AEROTECH Ndrive Linear Series Digital Servo Amplifiers – Linear -
 AEROTECH Ndrive HP 10/20/30 P/N: EDU170
AEROTECH Ndrive HP 10/20/30 P/N: EDU170 -
 AEROTECH EDU176_Ndrive_HL
AEROTECH EDU176_Ndrive_HL -
 ADVANCEDMOTION CONTROLS Analog Servo Drive 120A10
ADVANCEDMOTION CONTROLS Analog Servo Drive 120A10 -
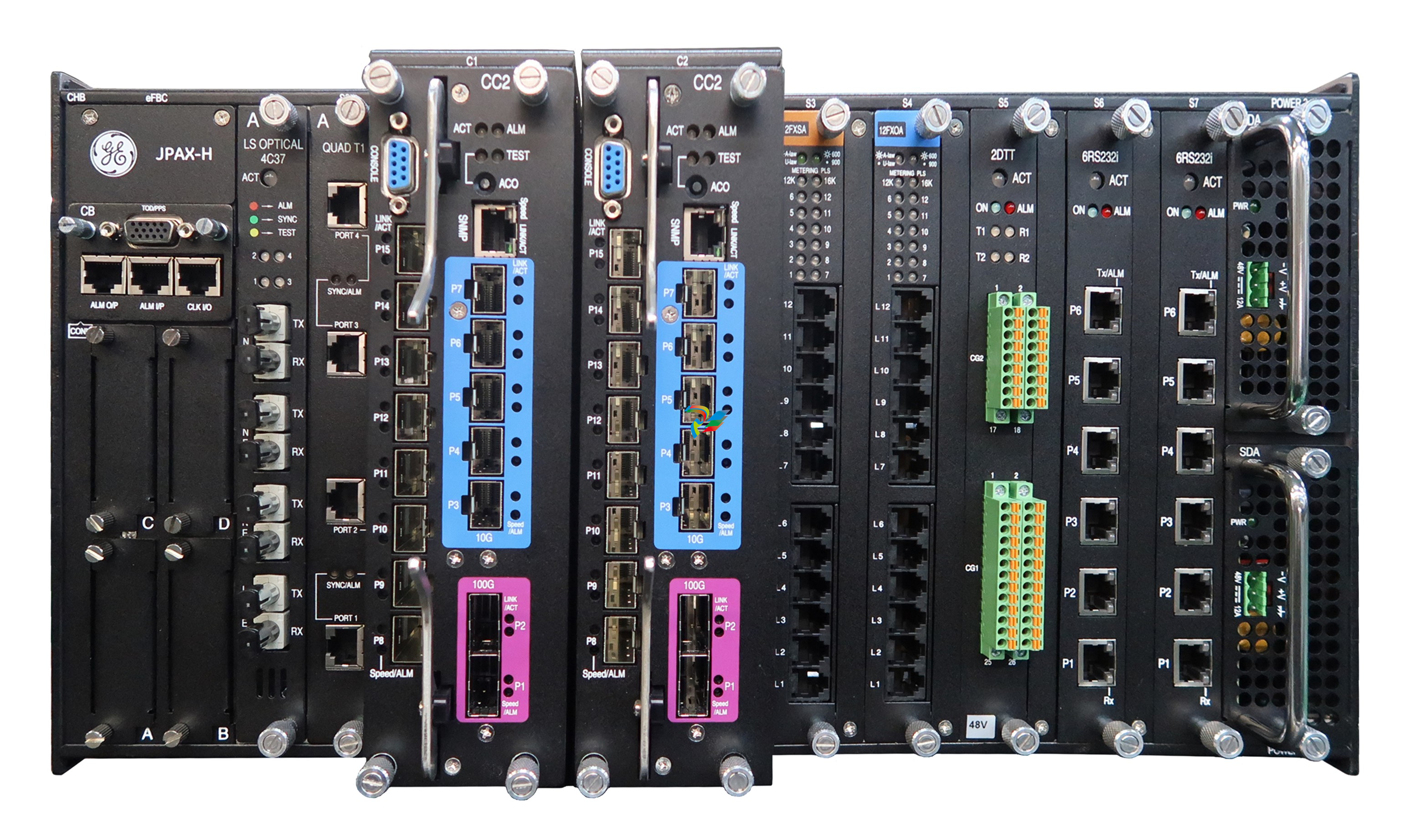 GE JPAX-H
GE JPAX-H -
 GE JPAX family
GE JPAX family -
 GE Industry Leading Experience
GE Industry Leading Experience -
 GE Ether-1000 Unit
GE Ether-1000 Unit -
 GE Cyber Secured Service Unit
GE Cyber Secured Service Unit -
 GE Lentronics E1MXe Multiplexer
GE Lentronics E1MXe Multiplexer -
 GE TTMX Teleprotection Terminal
GE TTMX Teleprotection Terminal -
 GE Lentronics T1 Multiplexer
GE Lentronics T1 Multiplexer -
 GE Lentronics JungleMUX SONET Multiplexer
GE Lentronics JungleMUX SONET Multiplexer -
 GE Lentronics E1MX Multiplexer
GE Lentronics E1MX Multiplexer -
GE Lentronics TN1Ue SDH Multiplexer
-
 GE Lentronics TN1U SDH Multiplexer
GE Lentronics TN1U SDH Multiplexer -
 GE Gridcom DXC Family Access and Transmission Multiplexer
GE Gridcom DXC Family Access and Transmission Multiplexer


