
ABBIndustrial Networks Connecting Controllers via OPC
available parts, also for testing purposes.
1.3 Goals
The goals of this Master’s Thesis are stated as follows:
• Setup and evaluation of a test environment
• Setup of test systems
• Theoretical and practical evaluation of the test systems concerning performance, availability and reliability.
• Identification of improvements and different approaches
• Comparison with alternatives
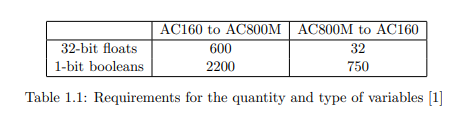
As a starting point for the performance requirements, the current implementation was taken. The corresponding quantity and type of variables are displayed in
Table 1.1 with 32-bit floating point values (floats) as analog in- and outputs and
1-bit boolean values as so-called status and command bits. In the current configuration with AC450 and AC160, all variables are written to the AF100 fieldbus with a
cycle time of 256 milliseconds. Therefore we determined the minimum requirement
for round-trip times from one controller to the other to exactly this time.
In agreement with the advisors, instead of elaborating the optional extension
stated in the task description (Appendix C), we spent more time on trying out a
second PROFIBUS approach and the theoretical derivation of a redundancy concept.
1.4 Structure
For the reader’s convenience this Master’s Thesis is structured thematically starting
with an overview of components and terms (2) in the next chapter. The following
chapters inform about the test system setup (3), the evaluations that were made
(4) and finally the results (5). In a subsequent chapter the subject redundancy
is treated (6) before the thesis comes to an end with the conclusion and outlook
(7). Additional information as well as a CD-ROM containing more detailed data is
located in the appendix of this thesis.
Chapter 2
Components and Terms
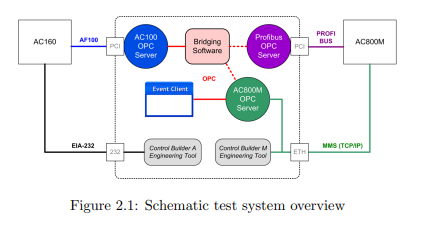
In this chapter, hardware and software parts as well as terms used for our test
system and evaluations will be described. Some additional devices and programs
concerning redundancy are introduced not until the chapter according. Information
on the version numbers can be found in Appendix B.
2.1 Basic Terms
• Performance, in this thesis, refers to the capability of a communication
component in means of speed and throughput.
• Availability is the term for the probability that a system will perform its
specified functions when used under stated conditions. A common mathematical definition of operational availability is Ao = MT BF/(MT BF + MDT),
whereas MTBF is the “mean time between failure” and MDT the “mean down
time” [2]. However, in this thesis, availability is used in a more general manner, since the basis for mathematical operations is not available.
• Reliability means the probability of a device remaining failure free during a
specified time interval, e.g. the maintenance interval: R = e
λt
• Redundancy is the implementation of extra components in addition to the
ones needed for normal operation. Thus, redundancy normally increases reliability and availability.
2.2 OPC
OPC, originally short for “OLE for Process Control”, is an open, standardized
software communication interface specification launched in 1996 by a task force of
different automation companies, later forming the OPC Foundation. As the former
name indicates, OPC is an adaption of Microsoft’s Object Linking and Embedding
OLE1
to the process control business, which used to be highly proprietary at that
point of time. Thus it was almost impossible to efficiently combine products of
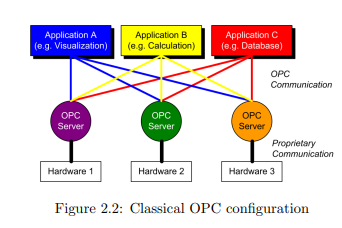
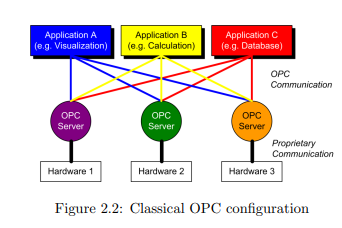
different vendors. By providing so-called OPC servers with their devices, buses and
software, vendors open their products to any OPC compliant client able to connect
to the server for data exchange. Usually, an OPC server can handle several clients
at once, while these clients—e.g. visualization or calculation applications—can connect to different servers in order to obtain their needed information
Over the years, the OPC Foundation has been adding eight additional specifications to the original one, therefore the name OPC was freed from its original
meaning and is now used as an umbrella term [3]. Some important specifications
are quickly explained in the following:
• DA (Data Access) is the original and most widely used standard of OPC.
Its purpose is the cyclic polling of real time data, for example for visualization
purposes.
1
http://msdn.microsoft.com/archive/default.asp?url=/archive/en-us/dnarolegen/
html/msdn_aboutole.asp
• HDA (Historical Data Access), in contrary, specifies the access to already
stored data.
• AE (Alarms and Events) describes the non-cyclic, event-based exchange
of alarms and events.
• Data eXchange is a specification from 2002 which regulates the direct communication between two OPC servers.
For this Master’s Thesis it was made use both of the DA specification for the
main purpose of communication as well as the AE specification in order to display
and log round-trip times. Unfortunately, the promising Data eXchange specification
is almost inexistent in practice and could therefore not be used in our thesis.
The underlying technique to exchange data is the component object model
COM of Microsoft Windows, therefore OPC can only run on Windows operating
systems [4]. A new generation of OPC specifications recently published is called
-
 Hirschmann RS20-1600M2T1SDAEHH03.1.02 Rail Switch
Hirschmann RS20-1600M2T1SDAEHH03.1.02 Rail Switch -
 Hirschmann BRS30-24TX Industrial Rail Switch
Hirschmann BRS30-24TX Industrial Rail Switch -
 Hirschmann RSPM20-4T14T1EV9HHS999.9.99 Managed Ethernet Switch
Hirschmann RSPM20-4T14T1EV9HHS999.9.99 Managed Ethernet Switch -
 Hirschmann BELDEN RS40-0009CCCCSDAPHH09.0.14 / RS400009CCCCSDAPHH09014
Hirschmann BELDEN RS40-0009CCCCSDAPHH09.0.14 / RS400009CCCCSDAPHH09014 -
Hirschmann RS40 Rail Switch RS40-0009CCCCSDAE
-
 Hirschmann BELDEN RS30-0802T1T1SDAP / RS300802T1T1SDAP Fully Managed Layer 2 Compact Rail Switch
Hirschmann BELDEN RS30-0802T1T1SDAP / RS300802T1T1SDAP Fully Managed Layer 2 Compact Rail Switch -
 Hirschmann BELDEN RS20-0800M2M2SDAUHH / RS200800M2M2SDAUHH
Hirschmann BELDEN RS20-0800M2M2SDAUHH / RS200800M2M2SDAUHH -
 Hirschmann EAGLE30-04022O6TT999SCCY9HSE3F Industrial Firewall Router Switch
Hirschmann EAGLE30-04022O6TT999SCCY9HSE3F Industrial Firewall Router Switch -
 Hirschmann RS20-1600T1T1SDAEHH09.0.14 RS20 Rail Mount Ethernet Switch
Hirschmann RS20-1600T1T1SDAEHH09.0.14 RS20 Rail Mount Ethernet Switch -
 Hirschmann EAGLE0200T1T1TDDY90000HHE05.3.03 Industrial Security Router
Hirschmann EAGLE0200T1T1TDDY90000HHE05.3.03 Industrial Security Router -
Hirschmann - BELDEN MIPP-AD-1L9P
-
 HIRSCHMANN RSPM20-4Z64Z6TV9HHS9 942 106-999 RAIL SAFETY SWITCH
HIRSCHMANN RSPM20-4Z64Z6TV9HHS9 942 106-999 RAIL SAFETY SWITCH -
 HIRSCHMANN FIBEROPTIC MODULE FIP P/N: OZDFIPG3T
HIRSCHMANN FIBEROPTIC MODULE FIP P/N: OZDFIPG3T -
 HIRSCHMANN RS20-1600M2M2SDAUHH Ethernet rack-mounted switch
HIRSCHMANN RS20-1600M2M2SDAUHH Ethernet rack-mounted switch -
 HIRSCHMANN BELDEN RS20-0400T1T1SDAEHH04.0.01 / RS200400T1T1SDAEHH04001
HIRSCHMANN BELDEN RS20-0400T1T1SDAEHH04.0.01 / RS200400T1T1SDAEHH04001 -
HIRSCHMANN MM2-4FXM3 MICE Media Module
-
HIRSCHMANN RS20-0800M2M2SDAE Industrial Ethernet Rail Switch
-
 Hirschmann RS20-2400T1T1SDAP / RS20-2400T1T1SDAPHH05.0.02
Hirschmann RS20-2400T1T1SDAP / RS20-2400T1T1SDAPHH05.0.02 -
 GE MLJ1005B010H00C MLJ Digital Synchromism Check
GE MLJ1005B010H00C MLJ Digital Synchromism Check -
 ALSTOM MICROTECH DX21-M2 Digital Excitation Controller
ALSTOM MICROTECH DX21-M2 Digital Excitation Controller -
HIRSCHMANN BRS20-1200ZZZZ-STCY99HHSES
-
 HIRSCHMANN MM3-4FXM2 MICE Media Module
HIRSCHMANN MM3-4FXM2 MICE Media Module -
Hirschmann RSB20-0800T1T1SAABHH 8Port ENet Rail Switch RSB20
-
 Hirschmann MACH102-8TP Ethernet Switch
Hirschmann MACH102-8TP Ethernet Switch -
 SAACKE DDZ-M marine steam pressure atomizer
SAACKE DDZ-M marine steam pressure atomizer -
 SAACKE SKV-A marine rotary cup atomizer
SAACKE SKV-A marine rotary cup atomizer -
 SAACKE Seavis HMI05e
SAACKE Seavis HMI05e -
 Kollmorgen MMC-SD-2.0-230 Servo Drive 100-240VAC 2KW 10A Output 3PH 100-240VAC
Kollmorgen MMC-SD-2.0-230 Servo Drive 100-240VAC 2KW 10A Output 3PH 100-240VAC -
 Kollmorgen Servo drive CR10550
Kollmorgen Servo drive CR10550 -
 Kollmorgen AKD-P01207-NACN-0054 Servo Driver
Kollmorgen AKD-P01207-NACN-0054 Servo Driver -
 Kollmorgen S406M-CA-036 Servostar
Kollmorgen S406M-CA-036 Servostar -
.png) Kollmorgen AKD-B02407-NAAN-0000 Digital Servo Drive
Kollmorgen AKD-B02407-NAAN-0000 Digital Servo Drive -
 Kollmorgen SERVOSTAR S406AM-CA Digital Servo Drive
Kollmorgen SERVOSTAR S406AM-CA Digital Servo Drive -
 KOLLMORGEN SERVOSTAR 603-AS SERVO AMPLIFIER_SERVOSTAR603AS_S60301
KOLLMORGEN SERVOSTAR 603-AS SERVO AMPLIFIER_SERVOSTAR603AS_S60301 -
Kollmorgen S700 Servo Controller (S70602-NANANA-NA)
-
 Kollmorgen MPK411 controller
Kollmorgen MPK411 controller -
 KOLLMORGEN MMC-SD-1.3-460-D Smart Drive
KOLLMORGEN MMC-SD-1.3-460-D Smart Drive -
 KOLLMORGEN AKM21C-CKB2AA-00 / AKM21CCKB2AA00 Servomotor
KOLLMORGEN AKM21C-CKB2AA-00 / AKM21CCKB2AA00 Servomotor -
 BECKHOFF AX5106-0000-0200 | Digital Compact Servo Drives 1-channel
BECKHOFF AX5106-0000-0200 | Digital Compact Servo Drives 1-channel -
 BECKHOFF C3620-0000 INDUSTRIAL COMPUTER (MOTORSHELVES)
BECKHOFF C3620-0000 INDUSTRIAL COMPUTER (MOTORSHELVES) -
 Beckhoff EK1960-0000 TwinSAFE Compact Controller
Beckhoff EK1960-0000 TwinSAFE Compact Controller -
 Beckhoff C6930-0050 Control Cabinet Industrial PC
Beckhoff C6930-0050 Control Cabinet Industrial PC -
 Beckhoff CP7711-0001-0030 Industrial Computer Detection
Beckhoff CP7711-0001-0030 Industrial Computer Detection -
 Beckhoff CX1001-0111 Embedded PC CPU Module
Beckhoff CX1001-0111 Embedded PC CPU Module -
 Beckhoff C6017-0020 | Ultra-compact Industrial PC
Beckhoff C6017-0020 | Ultra-compact Industrial PC -
 Beckhoff EK1322 | 2-port EtherCAT P junction with feed-in
Beckhoff EK1322 | 2-port EtherCAT P junction with feed-in -
 Beckhoff CP2219-0010 Panel
Beckhoff CP2219-0010 Panel -
 BECKHOFF C6015-0020 ULTRA COMPACT INDUSTRIAL PC
BECKHOFF C6015-0020 ULTRA COMPACT INDUSTRIAL PC -
 BECKHOFF CX2030-0120/Standard CPU Module Embedded PC Windows PLC controller
BECKHOFF CX2030-0120/Standard CPU Module Embedded PC Windows PLC controller -
 Beckhoff CP7721-1090-0020 Panel PC
Beckhoff CP7721-1090-0020 Panel PC -
 Beckhoff PC CPU Module CX5130-0175
Beckhoff PC CPU Module CX5130-0175 -
 Beckhoff C6920-0050 Control Cabinet
Beckhoff C6920-0050 Control Cabinet -
 Beckhoff EL6631 EtherCAT 2-Port Communication Interface, Profinet RT Controller
Beckhoff EL6631 EtherCAT 2-Port Communication Interface, Profinet RT Controller -
 Beckhoff CP6202-0001-0060 touch screen panel PC
Beckhoff CP6202-0001-0060 touch screen panel PC -
 Beckhoff CP3916-1002-0000 Multi-Touch Control Panel
Beckhoff CP3916-1002-0000 Multi-Touch Control Panel -
 Beckhoff EP1809-0021 | EtherCAT Box, 16-channel digital input, 24 V DC, 3 ms, M8Preferred type
Beckhoff EP1809-0021 | EtherCAT Box, 16-channel digital input, 24 V DC, 3 ms, M8Preferred type -
 Beckhoff CX8190 PLC Embedded Industrial PC Ethernet Controller
Beckhoff CX8190 PLC Embedded Industrial PC Ethernet Controller -
 Beckhoff CX2100-0914 Power Supply for External
Beckhoff CX2100-0914 Power Supply for External -
 Beckhoff Automation CP6906-0001-0000 HMI
Beckhoff Automation CP6906-0001-0000 HMI -
 Beckhoff EP7342-0002 Module
Beckhoff EP7342-0002 Module -
 Beckhoff CX1020-0112 / CX1100-0910 / CX1020-N010 / CX1100-0003 Windows CPU
Beckhoff CX1020-0112 / CX1100-0910 / CX1020-N010 / CX1100-0003 Windows CPU -
 Beckhoff EP7211-0034 EtherCAT Box 1 Channel Motion Interface
Beckhoff EP7211-0034 EtherCAT Box 1 Channel Motion Interface -
 Beckhoff C6240-0030 Control cabinet Industrial PC
Beckhoff C6240-0030 Control cabinet Industrial PC -
 beckhoff motherboard CB1052-0004 CB1052-0004
beckhoff motherboard CB1052-0004 CB1052-0004 -
 Beckhoff AX2006-AS Servo Drive / Variable Frequency Drive
Beckhoff AX2006-AS Servo Drive / Variable Frequency Drive -
BECKHOFF CP6207-0001-0020 NSMP
-
 Beckhoff C6930-1142-0060 Industrial Computer
Beckhoff C6930-1142-0060 Industrial Computer -
 Beckhoff FC7501-0000 interface card
Beckhoff FC7501-0000 interface card -
 Beckhoff CX5140-0175 Embedded PC PLC CPU CX5140 Industrial Controller
Beckhoff CX5140-0175 Embedded PC PLC CPU CX5140 Industrial Controller -
 Beckhoff CP7802-1100-0010: High-End IP65 Control Panel with DVI/USB Extended Interface
Beckhoff CP7802-1100-0010: High-End IP65 Control Panel with DVI/USB Extended Interface -
BECKHOFF CP3716-1058-0010 CONTROL PANEL
-
 Beckhoff AX8108-0000 Single-Axis Module
Beckhoff AX8108-0000 Single-Axis Module -
 Beckhoff CU8851-0000 | USB extension, USB Extended 2.0 receiver box
Beckhoff CU8851-0000 | USB extension, USB Extended 2.0 receiver box -
Beckhoff C6017-0030 | Ultra-compact Industrial PC
-
 Beckhoff CX1001-0120/CX10010120.cx1000-n001.cx1000-n000 System Overview
Beckhoff CX1001-0120/CX10010120.cx1000-n001.cx1000-n000 System Overview -
 Beckhoff CPU Module CX5140-0155/4GB CPU Module
Beckhoff CPU Module CX5140-0155/4GB CPU Module -
 Beckhoff CP6533-0001-005: Built-in Panel PC with High-Definition Multi-Touch Control
Beckhoff CP6533-0001-005: Built-in Panel PC with High-Definition Multi-Touch Control -
 Beckhoff EL5042 | EtherCAT Terminal, 2-channel encoder interface, BiSS® C
Beckhoff EL5042 | EtherCAT Terminal, 2-channel encoder interface, BiSS® C -
 Beckhoff C6920-1080-0040: Premium Control Cabinet Industrial PC
Beckhoff C6920-1080-0040: Premium Control Cabinet Industrial PC -
 Beckhoff C6920-0060 | Control cabinet Industrial PC
Beckhoff C6920-0060 | Control cabinet Industrial PC -
 Beckhoff Embedded-PC CX5010-1121
Beckhoff Embedded-PC CX5010-1121 -
 Beckhoff CB3050-0010 Mainboard Motherboard
Beckhoff CB3050-0010 Mainboard Motherboard -
 Beckhoff PLC module CX1020-0000 Basic CPU module (service phase)
Beckhoff PLC module CX1020-0000 Basic CPU module (service phase) -
 Beckhoff CP7812-1056-0010 15" Multitouch Display Control Panel
Beckhoff CP7812-1056-0010 15" Multitouch Display Control Panel -
 Beckhoff CX5120-0115 /2GB Controller Module
Beckhoff CX5120-0115 /2GB Controller Module -
 Beckhoff CP7201-1000-0000 Industrial Panel PC
Beckhoff CP7201-1000-0000 Industrial Panel PC -
 Beckhoff Servo Motor AM8061-0JH1-0000
Beckhoff Servo Motor AM8061-0JH1-0000 -
 BECKHOFF CP6503-0001-0050 Built-in Panel PC
BECKHOFF CP6503-0001-0050 Built-in Panel PC -
Beckhoff CP3919-0010 Display G190ETN01.2 19" PCT V04. Multi-touch Control Panel
-
 Beckhoff CX5110-0112-9020/000368201 Embedded PC Intel Atom Processor
Beckhoff CX5110-0112-9020/000368201 Embedded PC Intel Atom Processor -
 Beckhoff AX8206-0000 Dual-Axis Module
Beckhoff AX8206-0000 Dual-Axis Module -
Beckhoff Nail Operating Terminal CP7032-1031-0010
-
Beckhoff AM8042-0EH1-0000 Servomotor 4.10 Nm (M0), F4 (87 mm)
-
 Beckhoff EK9300 Beckhoff CPU Module
Beckhoff EK9300 Beckhoff CPU Module -
Beckhoff CP3224-0020 Multitouch-Panel-PC
-
 Beckhoff CP2712-0000 12.1" 24VDC Touch Screen WMD0
Beckhoff CP2712-0000 12.1" 24VDC Touch Screen WMD0 -
 BECKHOFF CX5240-0195 / 0000289234 Embedded PC 40 GB CFast Card
BECKHOFF CX5240-0195 / 0000289234 Embedded PC 40 GB CFast Card -
 Beckhoff CP6932-1000-0000 Control Panel
Beckhoff CP6932-1000-0000 Control Panel -
 BECKHOFF CX5120-0121 PLC Module
BECKHOFF CX5120-0121 PLC Module -
 Beckhoff EL3218 | EtherCAT Terminal, 8-channel analog input
Beckhoff EL3218 | EtherCAT Terminal, 8-channel analog input -
Beckhoff C6640-0050 | Control cabinet Industrial PC
-
 Beckhoff Cx5130-0120/4GB Embedded-PC
Beckhoff Cx5130-0120/4GB Embedded-PC -
 BECKHOFF CX2030-0122 PLC PROCESSOR
BECKHOFF CX2030-0122 PLC PROCESSOR -
 BECKHOFF CX5020-0122 Controller Module
BECKHOFF CX5020-0122 Controller Module -
 Beckhoff CP3915-0000 Multitouch Panel
Beckhoff CP3915-0000 Multitouch Panel -
 BECKHOFF EL3014 | EtherCAT Terminal
BECKHOFF EL3014 | EtherCAT Terminal -
 BECKHOFF Industrial Computer c6920-1057-0030
BECKHOFF Industrial Computer c6920-1057-0030 -
 Beckhoff CX5130-0141/4GB CX5130-0141 Embedded PC
Beckhoff CX5130-0141/4GB CX5130-0141 Embedded PC -
 Beckhoff C6240-1052-0040 4-086-06-3073 Industrial Computer
Beckhoff C6240-1052-0040 4-086-06-3073 Industrial Computer -
 Beckhoff CX5140-0135 /4GB High-Performance Embedded Industrial PC
Beckhoff CX5140-0135 /4GB High-Performance Embedded Industrial PC -
 Beckhoff C6515-1001-0000 Industrial PC
Beckhoff C6515-1001-0000 Industrial PC -
 Beckhoff AX5103-0000-0200 - Digital Compact Servo Drives
Beckhoff AX5103-0000-0200 - Digital Compact Servo Drives -
 Beckhoff CX2030-0130-1003/4GB Basic CPU module
Beckhoff CX2030-0130-1003/4GB Basic CPU module -
 Beckhoff AX8620-0000 Power Supply Module
Beckhoff AX8620-0000 Power Supply Module -
 Beckhoff CX9020-0111 module with
Beckhoff CX9020-0111 module with -
 Beckhoff EL7332 PLC Module
Beckhoff EL7332 PLC Module -
 BECKHOFF CP7709-0001-0020 HMI
BECKHOFF CP7709-0001-0020 HMI -
 Beckhoff CX5120-0155/2GB Embedded PC
Beckhoff CX5120-0155/2GB Embedded PC -
 BECKHOFF CP7037-1037-0010 OPERATOR INTERFACE TOUCHSCREEN
BECKHOFF CP7037-1037-0010 OPERATOR INTERFACE TOUCHSCREEN -
 Beckhoff EK9000 | ModbusTCP/UDP Bus Coupler
Beckhoff EK9000 | ModbusTCP/UDP Bus Coupler -
 Beckhoff Touch Panel Screen CP6020 -0000-0000
Beckhoff Touch Panel Screen CP6020 -0000-0000 -
 Beckhoff CX2020-0121 Module FAST Shipping
Beckhoff CX2020-0121 Module FAST Shipping -
 Beckhoff CX2030-0125 Basic CPU Module
Beckhoff CX2030-0125 Basic CPU Module -
 Beckhoff CP3918-0000 Multi-Touch 18.5" Control Panel
Beckhoff CP3918-0000 Multi-Touch 18.5" Control Panel -
 Automotion LC4A00010 DC BL Motor Control, ATS, Sub Assy, SCP, 115VAC,
Automotion LC4A00010 DC BL Motor Control, ATS, Sub Assy, SCP, 115VAC, -
 500T-115VAC - VAS ENGINEERING - DORIC 500 SERIES DIGITAL TEMP INDICATOR
500T-115VAC - VAS ENGINEERING - DORIC 500 SERIES DIGITAL TEMP INDICATOR -
 Honeywell X-DCS2000/EN Digital Integrated System Manager 50/60Hz 100-240V #4
Honeywell X-DCS2000/EN Digital Integrated System Manager 50/60Hz 100-240V #4 -
 Kollmorgen S60600 Servostar600 606-Fan 4 kVA, 6 A, 3 X 230 - 480 V
Kollmorgen S60600 Servostar600 606-Fan 4 kVA, 6 A, 3 X 230 - 480 V


