
ABB AC160Industrial Networks Connecting Controllers via OPC
Abstract
In order to modernize their infrastructure and keep up with the state
of the art, ABB Power Systems decided to replace the older controller
AC450 with a new generation of controllers called AC800M. Just like i
ts predecessor, its main task is to work as a sequencer in an otherwis
e mostly unchanging topology. Although the new controller AC800M
provides modern communication features and a sophisticated applica
ion development system, it lacks of a communication interface compa
tible with the residing controllers AC160. A hardware approach addres
sing this problem is in development, but not available at this point of t
ime. Thus the decision was made to realize the connection using OPC,
a widely spread and open software communication interface standard
with a high potential of reusability. In addition, it was aimed at gainin
g additional knowledge about the OPC interface, which is commonly u
sed in industry. In this thesis, we evaluate adequate hardware and sof
tware to realize this connection and we have programmed the controll
ers with applications to evaluate its performance and integrity. In add
ition, we are making considerations about redundancy that is vital in
automation business in order to increase reliability and availability. W
e have shown that it is possible to interconnect controllers using OPC
with satisfactory average performance results. Due to high maximum
round trip times and high complexity when realizing redundancy, it is
recommended to use such a system for testing purposes or non-critica
l operational applications, but not for critical systems. In this thesis we
also identify and judge several alternative ways of connection.
Acknowledgements
First of all, I would like to thank Prof. Dr. Bernhard Plattner of the Computer
Engineering and Networks Laboratory TIK at the Swiss Federal Institute of Technology ETH Zurich for supporting and supervising this Master’s Thesis. Special
thanks go to my advisors Rainer Baumann and Bernhard Tellenbach of TIK for
their straightforward and helpful support during my work.
Secondly I would like to thank Dr. Esther Gelle and Pascal Aebli of ABB for
enabling this Master’s Thesis in the first place as well as providing aid throughout
this thesis. Special thanks also to Stephan Egli for supporting me with the first
steps, Swen Woldau for numerous hints concerning AC160 and AF100 as well as
Juerg Beck for AC800M tips and tricks. Finally I would like to thank everyone else
at PSPD for the provided aid and making my work so convenient not only in a
technical but also in a human manner.
Baden, June 2007
Martin Pfister
Introduction
This chapter will provide a rough overview of the problem treated by this Master’s
Thesis. All technical devices and expressions will be explained more precisely in
the next chapter. Please note that since this is a public thesis, it does not contain
sensitive company-internal data.
ABB Power Systems
ABB Power Systems is one of the world’s leading providers of infrastructure for
controlling combined cycle power stations and waste-to-energy plants. Such a
plant control infrastructure includes several hardware parts consisting of controllers,
input/output-boards and communication devices as well as many software components to engineer, run, observe and analyze the power plant. A power plant control
system has to satisfy a broad variety of different needs, from the efficient and reliable control of the turbines and associated supporting functions (such as lube oil)
to easy configuration and operation as well as to sophisticated analysis functions
addressing technical and economical aspects.
Problem Statement
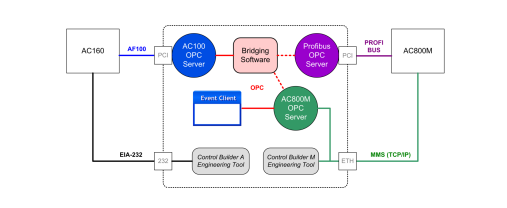
Due to high investment costs, the technical management of power plants is a slowgoing business with long life-cycles. Thus, a considerable amount of hardware devices currently in use are tens of years old. For future applications within ABB Power Systems it will be necessary to connect a controller of the newest series used within ABB, Control IT AC800M, with an older controller of the type Advant Controller 160 (AC160). The problem is that these two controllers do not share a fast communication interface of similar type and therefore cannot communicate directly. The standard communication intended for AC160 is Advant Fieldbus 100 (AF100). However, AC800M can support a whole range of buses except for AF100. As a consequence, the communication must be implemented using some relaying technique.

1.2.1 The Use of OPC
It was decided in advance to realize the relaying connection using OPC. This solution was chosen because OPC is an open standard and very common in process and automation industry. Furthermore, this solution offers a high potential to be used for similar problems, since a lot of devices support this specification. However, OPC is normally not used for fast controller-to-controller communication but for slower visualization and logging purposes and there is no performance data available for this kind of connection. The use of OPC is therefore both challenging as well as interesting to gain more insights and know-how. It is also to mention that a hardware solution addressing our problem is not available yet. It is therefore necessary to have an alternative way using already available parts, also for testing purposes.
1.3 Goals
The goals of this Master’s Thesis are stated as follows:
• Setup and evaluation of a test environment
• Setup of test systems
• Theoretical and practical evaluation of the test systems concerning performance, availability and reliability.
• Identification of improvements and different approaches
• Comparison with alternatives As a starting point for the performance requirements, the current implementation was taken. The corresponding quantity and type of variables are displayed in Table 1.1 with 32-bit floating point values (floats) as analog in- and outputs and 1-bit boolean values as so-called status and command bits. In the current configuration with AC450 and AC160, all variables are written to the AF100 fieldbus with a cycle time of 256 milliseconds. Therefore we determined the minimum requirement for round-trip times from one controller to the other to exactly this time. In agreement with the advisors, instead of elaborating the optional extension stated in the task description (Appendix C), we spent more time on trying out a
1.4 Structure
For the reader’s convenience this Master’s Thesis is structured thematically starting with an overview of components and terms
(2) in the next chapter. The following chapters inform about the test system setup
(3), the evaluations that were made
(4) and finally the results
(5). In a subsequent chapter the subject redundancy is treated
(6) before the thesis comes to an end with the conclusion and outlook
(7). Additional information as well as a CD-ROM containing more detailed data is
located in the appendix of this thesis.
Chapter 2
Components and Terms
In this chapter, hardware and software parts as well as terms used for our test
system and evaluations will be described. Some additional devices and programs
concerning redundancy are introduced not until the chapter according. Information
on the version numbers can be found in Appendix B.
2.1 Basic Terms
• Performance, in this thesis, refers to the capability of a communication component in means of speed and throughput.
• Availability is the term for the probability that a system will perform its specified functions when used under stated conditions. A common mathematical definition of operational availability is Ao = MT BF/(MT BF + MDT), whereas MTBF is the “mean time between failure” and MDT the “mean down time” [2]. However, in this thesis, availability is used in a more general manner, since the basis for mathematical operations is not available
• Reliability means the probability of a device remaining failure free during a specified time interval, e.g. the maintenance interval: R = e λt
• Redundancy is the implementation of extra components in addition to the ones needed for normal operation. Thus, redundancy normally increases reliability and availability
2.2 OPC
OPC, originally short for “OLE for Process Control”, is an open, standardized
software communication interface specification launched in 1996 by a task force of
different automation companies, later forming the OPC Foundation. As the former
name indicates, OPC is an adaption of Microsoft’s Object Linking and Embedding
OLE1
to the process control business, which used to be highly proprietary at that
point of time. Thus it was almost impossible to efficiently combine products of
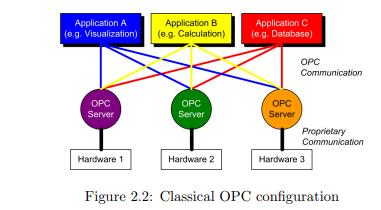
different vendors. By providing so-called OPC servers with their devices, buses and
software, vendors open their products to any OPC compliant client able to connect
to the server for data exchange. Usually, an OPC server can handle several clients
at once, while these clients—e.g. visualization or calculation applications—can connect to different servers in order to obtain their needed information.
Over the years, the OPC Foundation has been adding eight additional specifications to the original one, therefore the name OPC was freed from its original meaning and is now used as an umbrella term [3]. Some important specifications are quickly explained in the following:
•DA (Data Access) is the original and most widely used standard of OPC. Its purpose is the cyclic polling of real time data, for example for visualization purposes.
• HDA (Historical Data Access), in contrary, specifies the access to already stored data.
• AE (Alarms and Events) describes the non-cyclic, event-based exchange of alarms and events.
• Data eXchange is a specification from 2002 which regulates the direct communication between two OPC servers
For this Master’s Thesis it was made use both of the DA specification for the main purpose of communication as well as the AE specification in order to display and log round-trip times. Unfortunately, the promising Data eXchange specification is almost inexistent in practice and could therefore not be used in our thesis. The underlying technique to exchange data is the component object model COM of Microsoft Windows, therefore OPC can only run on Windows operating systems
[4]. A new generation of OPC specifications recently published is called OPC Unified Architecture (OPC UA) and is independent of COM, thus being able to run on more operating systems as well as embedded devices [5].
2.2.1 OPC Data Acces
OPC DA is organized in the hierarchical structure server, group and item. Items
correspond to variables and can be read and written. Furthermore, a quality and
time stamp is provided with each of them. When reading items, the value usually
comes from the OPC server’s cache, which is updated periodically with the values
of the device (or bus, component). However, it is usually possible to force a read
directly from the device. Clients organize their items in groups, which for example
share the same access method and update rate. Each OPC server has an unique
name, some vendors even offer the operation of multiple servers for the same device.
OPC DA provides different methods to access items, first of all synchronous and
asynchronous read and write operations. More important to us, there is also a
subscription mechanism, which is commonly used by modern clients in order to
reduce communication. That is, the client group subscribes to the server which
then “pushes” values towards the client only if they changed respectively exceed a
pre-defined dead-band. The client can force an update of all these values by issuing
a refresh call, which corresponds to an asynchronous read for all items of a group
[6].
2.3 Programmable Logic Controllers
This section informs about the two controllers involved and about the controller
that has to be replaced. Please notice that we use the term controller equivalent
to programmable logic controller (PLC) throughout our Master’s Thesis.
2.3.1 Advant Controller 160 (AC160)
The AC160 series was launched in 1997 to meet high speed requirements in turbine control. To this day its outstanding performance is needed for fast closed loop control (CLC). For our work, we were provided with a rack RF616 for the physical mounting of the controller parts. The rack also delivers power to each device and includes the BIOB Backplane Input/Output Bus which, among other tasks, processes the communication between the processor module and the communication interface. The tests in this Master’s Thesis were done with processor modules of the type PM665 (containing a Motorola MPC8240 processor) and the AF100 communication interface CI631, both supporting redundancy [7]. To program the processor module, its built-in EIA-232 interface was connected to the engineering PC.
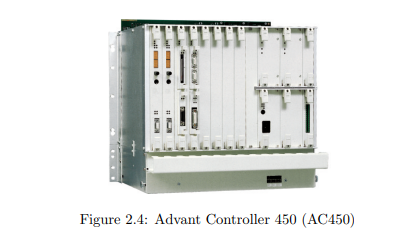
2.3.2 Advant Controller 450 (AC450)
AC450 is the controller to be replaced by the new generation. Its processor module
is built up around a Motorola 68040 microprocessor running at 25 MHz [8]. While its
performance is quite limited, AC450 also lacks of modern communication interfaces
and standards like Ethernet, which become more and more important.
2.3.3 Control IT AC800M
Control IT AC800M is the most current controller series used within all of ABB,
introduced in 2001 [9]. It strikes with its small outline and offers modern communication interfaces. For our tests we were provided with a processor module
PM864A which contains a Motorola MPC862 microprocessor running at 96 MHz
[10]. In addition to two EIA-232 interfaces, the processor module of AC800M offers
two built-in 10 Mbit/s standard Ethernet ports, used for instance to connect to the
engineering computer.
The communication interface CI854A is a sophisticated device to establish
PROFIBUS communication. The device even offers an own web interface which
allows e.g. the surveillance of the cycle time. The device is directly coupled to the processor module via the Communication Extension Bus (CEX) [11]. At this point of time, CI854A can only act as a PROFIBUS master, but not as slave. As a consequence, communication partners must be slaves.
2.4 Bus and Network Communication
This section describes the different communication approaches used in our system
2.4.1 Advant Fieldbus 100 (AF100)
AF100 is a high performance fieldbus system with time synchronization and the most popular fieldbus used within ABB,
common to almost all platforms. Although the name Advant Fieldbus 100 is ABB proprietary, it complies to IEC standard
61375-3 as well as US-standard IEEE 1473 and is widely used in railways under the name of MVB. AF100 works over tw
isted pair, coaxial and optical media at a rate of 1.5 Mbit/s. For our system we made use of the first method only. Bus ma
ster responsibility is shared by all communication interfaces with administrator
Diplomarbeit ABB Schweiz AG
Power Systems / Power Generation
Industrielle Netzwerke Leistung – Verfügbarkeit – Zuverlässigkeit
Es sollen die bestehenden Strukturen von industriellen Netzwerken und Bussystemen für die Kraftwerksautomation basierend auf dem ABB Leitsystem 800xA analysiert werden. Dabei sollen verschiedene Fragestellungen in den Bereichen Verfügbarkeit, Leistung und Sicherheit bearbeitet werden.
Das ABB Control-System welches zur Steuerung von Hochleistungs-Gasturbinen eingesetzt wird, soll mit den neuesten Technologien punkto offener Schnittstellen, Anbindung an TCP/IP Netzwerke und Unterstützung von Device Management Tools etc. ausgerüstet werden. Hierzu soll der bestehende „Kopf-Rechner“ Advant Controller 450 durch einen Controller der neuesten Generation, einen AC800 M Controller ersetzt werden.
Die Aufgabe besteht darin, den AC800 M Controller an einen Advant Controller 160 über das bestehende Interface AF100 OPC Server anzukoppeln. Es ist eine Lösung zu erarbeiten, welche zyklischen Datenaustausch des AC800 M Controllers mit dem AC160 Controller unter Einhaltung des geforderten Datendurchsatzes, der Verfügbarkeit und der Zuverlässigkeit ermöglicht. Dabei sind die zurzeit verfügbaren Produkte und Technologien der Plattform zu nutzen.
Die Bearbeitung der oben aufgeführten Fragestellungen beinhaltet sowohl einen theoretischen als auch einen praktischen Teil. Dabei sollen Daten für die Leistung, Verfügbarkeit und Zuverlässigkeit der erarbeiteten Lösung theoretisch hergeleitet, sowie ein System aufgebaut werden. Am aufgebauten System soll anhand von durchgeführten Tests Verbesserungsvorschläge resp. Änderungen an der System-Architektur evaluiert werden können.
Die technischen Spezifikationen des Control-Systems sind soweit möglich einzuhalten resp. Abweichungen entsprechend zu dokumentieren.
Eine optionale Ausweitung der Aufgabenstellung besteht in folgender Leistung. Das System 800xA basiert seit der Einführung vor mehreren Jahren auf OPC. In der Vergangenheit wurden solche Systeme immer in einem eigenen Netzwerk und eigener Windows Domäne realisiert. Heutige Kundenanforderungen zielen immer häufiger darauf ab, dass sich OPC Server und OPC Client in unterschiedlichen Netzwerken resp. Domänen befinden. Im Rahmen der Diplomarbeit soll geklärt werden, welche Einbussen in der Übermittlungsleistung in Kauf genommen werden müssen, wenn Server und Client in unterschiedlichen Domänen liegen resp. welche Massnahmen ergriffen werden können, damit die Leistungseinbussen möglichst gering bleiben.
-
 Beckhoff Polaris CP7011-1002-0010 operator operator HMI display 30.5 cm
Beckhoff Polaris CP7011-1002-0010 operator operator HMI display 30.5 cm -
 Beckhoff AM8052-0JH1-0000 Servomotor 10.7 Nm (M0), F5 (104 mm)
Beckhoff AM8052-0JH1-0000 Servomotor 10.7 Nm (M0), F5 (104 mm) -
 Beckhoff BX5100-0000 CANopen Bus Terminal Controller
Beckhoff BX5100-0000 CANopen Bus Terminal Controller -
 Beckhoff CX9020-0115 PLC Module CX90200115
Beckhoff CX9020-0115 PLC Module CX90200115 -
 Beckhoff module EJ7211-0010 EtherCAT plug-in module
Beckhoff module EJ7211-0010 EtherCAT plug-in module -
 BECKHOFF AX5203-0000 Servo Driver
BECKHOFF AX5203-0000 Servo Driver -
 BECKHOFF CP6201-0001-0020 24VDC UNMP
BECKHOFF CP6201-0001-0020 24VDC UNMP -
 Beckhoff CX5120-0135 Embedded PC CPU Module
Beckhoff CX5120-0135 Embedded PC CPU Module -
 BECKHOFF C5240-0020/000224115 Plc Module
BECKHOFF C5240-0020/000224115 Plc Module -
 Beckhoff CP2918-0000 nelCP29xx-0000Pa | Multi-touch built-in Control Panel with DVI/USB Extended interface
Beckhoff CP2918-0000 nelCP29xx-0000Pa | Multi-touch built-in Control Panel with DVI/USB Extended interface -
 Beckhoff CX2020-0122 Embedded PC Controller
Beckhoff CX2020-0122 Embedded PC Controller -
 Beckhoff C6640-0040 Control Cabinet Industrial PC 7-Slot
Beckhoff C6640-0040 Control Cabinet Industrial PC 7-Slot -
 BECKHOFF CONTROL CABINET INDUSTRIAL PC - C6930-1062-0050
BECKHOFF CONTROL CABINET INDUSTRIAL PC - C6930-1062-0050 -
 Beckhoff Automation EtherCAT Terminal EK1100 EK1122
Beckhoff Automation EtherCAT Terminal EK1100 EK1122 -
Beckhoff CP6533-0001-0060 IPC
-
 Beckhoff EK9500 | EtherNet/IP™ Bus Coupler
Beckhoff EK9500 | EtherNet/IP™ Bus Coupler -
 Beckhoff CP6202-1047-0050 - An industrial-grade embedded panel computer.
Beckhoff CP6202-1047-0050 - An industrial-grade embedded panel computer. -
 Beckhoff C6650-0040 Industrial PC
Beckhoff C6650-0040 Industrial PC -
 BECKHOFF CX5230-0185 / 000119805 PLC Module
BECKHOFF CX5230-0185 / 000119805 PLC Module -
 BECKHOFF EL4732 | EtherCAT Terminal, 2-channel analog output, voltage, ±10 V, 16 bit, oversampling
BECKHOFF EL4732 | EtherCAT Terminal, 2-channel analog output, voltage, ±10 V, 16 bit, oversampling -
 Beckhoff CP6202-0001-0010 Economy Built-In Panel
Beckhoff CP6202-0001-0010 Economy Built-In Panel -
 Beckhoff AX5206-0000-0202 Digital Compact Servo Drives 2-channel
Beckhoff AX5206-0000-0202 Digital Compact Servo Drives 2-channel -
 Beckhoff CP6606-0001-0020 7-inch Economy Panel PC
Beckhoff CP6606-0001-0020 7-inch Economy Panel PC -
 Beckhoff CPU basic module CX2020-0155 + power supply module CX2100-0004
Beckhoff CPU basic module CX2020-0155 + power supply module CX2100-0004 -
 Beckhoff CP2913-000 Multi-Touch Display
Beckhoff CP2913-000 Multi-Touch Display -
 Beckhoff CP6500-1012-0060 14250369 Control Cabinet
Beckhoff CP6500-1012-0060 14250369 Control Cabinet -
 Beckhoff CP7902-0001-0000 Economy Control Panel with DVI/USB Extended interface
Beckhoff CP7902-0001-0000 Economy Control Panel with DVI/USB Extended interface -
 Beckhoff C6920-0010 Control cabinet Industrial PC
Beckhoff C6920-0010 Control cabinet Industrial PC -
 BECKHOFF C3640-0050 Build-in Industrial PCs
BECKHOFF C3640-0050 Build-in Industrial PCs -
 Beckhoff KL6023-0000 KL6023 EnOcean Wireless-Adapter
Beckhoff KL6023-0000 KL6023 EnOcean Wireless-Adapter -
 Kollmorgen AKM54G-ANC2DB00 servo motor
Kollmorgen AKM54G-ANC2DB00 servo motor -
 Kollmorgen AKD-P00606-NBCN-0000 Servo Drive
Kollmorgen AKD-P00606-NBCN-0000 Servo Drive -
Kollmorgen S200 Series S20350-VTS SERVO DRIVE
-
 KOLLMORGEN AKD-P00606-NBCC-I000 SERVO DRIVE
KOLLMORGEN AKD-P00606-NBCC-I000 SERVO DRIVE -
 Kollmorgen MV65WKS-CE310/22PB Servo Drive Control Module
Kollmorgen MV65WKS-CE310/22PB Servo Drive Control Module -
 Kollmorgen S20360-VTS-021 Servo Drive
Kollmorgen S20360-VTS-021 Servo Drive -
 KOLLMORGEN CR06550 High-precision digital servo amplifier
KOLLMORGEN CR06550 High-precision digital servo amplifier -
 KOLLMORGEN DBL5N01050-03S-VV0-S40 3-Phase AC Synchronous Brushless Servo Motor
KOLLMORGEN DBL5N01050-03S-VV0-S40 3-Phase AC Synchronous Brushless Servo Motor -
 KOLLMORGEN S70301-NANANA-024 SERVO DRIVE
KOLLMORGEN S70301-NANANA-024 SERVO DRIVE -
 Kollmorgen S20360-VTS S200 Series Servo Drive
Kollmorgen S20360-VTS S200 Series Servo Drive -
 Kollmorgen RBE-03011-A00 Brushless Frameless Servo Motor
Kollmorgen RBE-03011-A00 Brushless Frameless Servo Motor -
 KOLLMORGEN AKD-T00306-NBAN-0000 INPUT SERVO DRIVE
KOLLMORGEN AKD-T00306-NBAN-0000 INPUT SERVO DRIVE -
 KOLLMORGEN S700 Servo Controller S70302-NANANA
KOLLMORGEN S700 Servo Controller S70302-NANANA -
 Kollmorgen AKD-P00607-NBEC-0000 400/480VAC 4.40KVA Servo Drive.
Kollmorgen AKD-P00607-NBEC-0000 400/480VAC 4.40KVA Servo Drive. -
 KOLLMORGEN S70102-NANANA SERVO DRIVE
KOLLMORGEN S70102-NANANA SERVO DRIVE -
 KOLLMORGEN AKM21E-ANSNEH02 PM Servo Motor & PRD-AMPE25EB-00 Servo Drive Array
KOLLMORGEN AKM21E-ANSNEH02 PM Servo Motor & PRD-AMPE25EB-00 Servo Drive Array -
 KollMorgen SC1R06260 Servo Drive 1.4/2.2 KVA 115230 Vac
KollMorgen SC1R06260 Servo Drive 1.4/2.2 KVA 115230 Vac -
 Kollmorgen AKD-P00306-NBAN-0000 Servo Drive
Kollmorgen AKD-P00306-NBAN-0000 Servo Drive -
Kollmorgen TTB2-2042-3052-A DC Motor Industrial Drive 5.5A 185 oz/in
-
 KOLLMORGEN SERVOSTAR 610-AS SERVO AMPLIFIER_SERVOSTAR610AS_S61001
KOLLMORGEN SERVOSTAR 610-AS SERVO AMPLIFIER_SERVOSTAR610AS_S61001 -
 KOLLMORGEN PRD-0016400P-10 & PRD-0016600D-30 Axis Control System Modules
KOLLMORGEN PRD-0016400P-10 & PRD-0016600D-30 Axis Control System Modules -
KOLLMORGEN Seidel DBL5N01700-03S-000-S40 Servo Motor
-
 Hirschmann RS20-1600M2T1SDAEHH03.1.02 Rail Switch
Hirschmann RS20-1600M2T1SDAEHH03.1.02 Rail Switch -
 Hirschmann BRS30-24TX Industrial Rail Switch
Hirschmann BRS30-24TX Industrial Rail Switch -
 Hirschmann RSPM20-4T14T1EV9HHS999.9.99 Managed Ethernet Switch
Hirschmann RSPM20-4T14T1EV9HHS999.9.99 Managed Ethernet Switch -
 Hirschmann BELDEN RS40-0009CCCCSDAPHH09.0.14 / RS400009CCCCSDAPHH09014
Hirschmann BELDEN RS40-0009CCCCSDAPHH09.0.14 / RS400009CCCCSDAPHH09014 -
Hirschmann RS40 Rail Switch RS40-0009CCCCSDAE
-
 Hirschmann BELDEN RS30-0802T1T1SDAP / RS300802T1T1SDAP Fully Managed Layer 2 Compact Rail Switch
Hirschmann BELDEN RS30-0802T1T1SDAP / RS300802T1T1SDAP Fully Managed Layer 2 Compact Rail Switch -
 Hirschmann BELDEN RS20-0800M2M2SDAUHH / RS200800M2M2SDAUHH
Hirschmann BELDEN RS20-0800M2M2SDAUHH / RS200800M2M2SDAUHH -
 Hirschmann EAGLE30-04022O6TT999SCCY9HSE3F Industrial Firewall Router Switch
Hirschmann EAGLE30-04022O6TT999SCCY9HSE3F Industrial Firewall Router Switch -
 Hirschmann RS20-1600T1T1SDAEHH09.0.14 RS20 Rail Mount Ethernet Switch
Hirschmann RS20-1600T1T1SDAEHH09.0.14 RS20 Rail Mount Ethernet Switch -
 Hirschmann EAGLE0200T1T1TDDY90000HHE05.3.03 Industrial Security Router
Hirschmann EAGLE0200T1T1TDDY90000HHE05.3.03 Industrial Security Router -
Hirschmann - BELDEN MIPP-AD-1L9P
-
 HIRSCHMANN RSPM20-4Z64Z6TV9HHS9 942 106-999 RAIL SAFETY SWITCH
HIRSCHMANN RSPM20-4Z64Z6TV9HHS9 942 106-999 RAIL SAFETY SWITCH -
 HIRSCHMANN FIBEROPTIC MODULE FIP P/N: OZDFIPG3T
HIRSCHMANN FIBEROPTIC MODULE FIP P/N: OZDFIPG3T -
 HIRSCHMANN RS20-1600M2M2SDAUHH Ethernet rack-mounted switch
HIRSCHMANN RS20-1600M2M2SDAUHH Ethernet rack-mounted switch -
 HIRSCHMANN BELDEN RS20-0400T1T1SDAEHH04.0.01 / RS200400T1T1SDAEHH04001
HIRSCHMANN BELDEN RS20-0400T1T1SDAEHH04.0.01 / RS200400T1T1SDAEHH04001 -
HIRSCHMANN MM2-4FXM3 MICE Media Module
-
HIRSCHMANN RS20-0800M2M2SDAE Industrial Ethernet Rail Switch
-
 Hirschmann RS20-2400T1T1SDAP / RS20-2400T1T1SDAPHH05.0.02
Hirschmann RS20-2400T1T1SDAP / RS20-2400T1T1SDAPHH05.0.02 -
 GE MLJ1005B010H00C MLJ Digital Synchromism Check
GE MLJ1005B010H00C MLJ Digital Synchromism Check -
 ALSTOM MICROTECH DX21-M2 Digital Excitation Controller
ALSTOM MICROTECH DX21-M2 Digital Excitation Controller -
HIRSCHMANN BRS20-1200ZZZZ-STCY99HHSES
-
 HIRSCHMANN MM3-4FXM2 MICE Media Module
HIRSCHMANN MM3-4FXM2 MICE Media Module -
Hirschmann RSB20-0800T1T1SAABHH 8Port ENet Rail Switch RSB20
-
 Hirschmann MACH102-8TP Ethernet Switch
Hirschmann MACH102-8TP Ethernet Switch -
 SAACKE DDZ-M marine steam pressure atomizer
SAACKE DDZ-M marine steam pressure atomizer -
 SAACKE SKV-A marine rotary cup atomizer
SAACKE SKV-A marine rotary cup atomizer -
 SAACKE Seavis HMI05e
SAACKE Seavis HMI05e -
 Kollmorgen MMC-SD-2.0-230 Servo Drive 100-240VAC 2KW 10A Output 3PH 100-240VAC
Kollmorgen MMC-SD-2.0-230 Servo Drive 100-240VAC 2KW 10A Output 3PH 100-240VAC -
 Kollmorgen Servo drive CR10550
Kollmorgen Servo drive CR10550 -
 Kollmorgen AKD-P01207-NACN-0054 Servo Driver
Kollmorgen AKD-P01207-NACN-0054 Servo Driver -
 Kollmorgen S406M-CA-036 Servostar
Kollmorgen S406M-CA-036 Servostar -
.png) Kollmorgen AKD-B02407-NAAN-0000 Digital Servo Drive
Kollmorgen AKD-B02407-NAAN-0000 Digital Servo Drive -
 Kollmorgen SERVOSTAR S406AM-CA Digital Servo Drive
Kollmorgen SERVOSTAR S406AM-CA Digital Servo Drive -
 KOLLMORGEN SERVOSTAR 603-AS SERVO AMPLIFIER_SERVOSTAR603AS_S60301
KOLLMORGEN SERVOSTAR 603-AS SERVO AMPLIFIER_SERVOSTAR603AS_S60301 -
Kollmorgen S700 Servo Controller (S70602-NANANA-NA)
-
 Kollmorgen MPK411 controller
Kollmorgen MPK411 controller -
 KOLLMORGEN MMC-SD-1.3-460-D Smart Drive
KOLLMORGEN MMC-SD-1.3-460-D Smart Drive -
 KOLLMORGEN AKM21C-CKB2AA-00 / AKM21CCKB2AA00 Servomotor
KOLLMORGEN AKM21C-CKB2AA-00 / AKM21CCKB2AA00 Servomotor -
 BECKHOFF AX5106-0000-0200 | Digital Compact Servo Drives 1-channel
BECKHOFF AX5106-0000-0200 | Digital Compact Servo Drives 1-channel -
 BECKHOFF C3620-0000 INDUSTRIAL COMPUTER (MOTORSHELVES)
BECKHOFF C3620-0000 INDUSTRIAL COMPUTER (MOTORSHELVES) -
 Beckhoff EK1960-0000 TwinSAFE Compact Controller
Beckhoff EK1960-0000 TwinSAFE Compact Controller -
 Beckhoff C6930-0050 Control Cabinet Industrial PC
Beckhoff C6930-0050 Control Cabinet Industrial PC -
 Beckhoff CP7711-0001-0030 Industrial Computer Detection
Beckhoff CP7711-0001-0030 Industrial Computer Detection -
 Beckhoff CX1001-0111 Embedded PC CPU Module
Beckhoff CX1001-0111 Embedded PC CPU Module -
 Beckhoff C6017-0020 | Ultra-compact Industrial PC
Beckhoff C6017-0020 | Ultra-compact Industrial PC -
 Beckhoff EK1322 | 2-port EtherCAT P junction with feed-in
Beckhoff EK1322 | 2-port EtherCAT P junction with feed-in -
 Beckhoff CP2219-0010 Panel
Beckhoff CP2219-0010 Panel -
 BECKHOFF C6015-0020 ULTRA COMPACT INDUSTRIAL PC
BECKHOFF C6015-0020 ULTRA COMPACT INDUSTRIAL PC -
 BECKHOFF CX2030-0120/Standard CPU Module Embedded PC Windows PLC controller
BECKHOFF CX2030-0120/Standard CPU Module Embedded PC Windows PLC controller -
 Beckhoff CP7721-1090-0020 Panel PC
Beckhoff CP7721-1090-0020 Panel PC -
 Beckhoff PC CPU Module CX5130-0175
Beckhoff PC CPU Module CX5130-0175 -
 Beckhoff C6920-0050 Control Cabinet
Beckhoff C6920-0050 Control Cabinet -
 Beckhoff EL6631 EtherCAT 2-Port Communication Interface, Profinet RT Controller
Beckhoff EL6631 EtherCAT 2-Port Communication Interface, Profinet RT Controller -
 Beckhoff CP6202-0001-0060 touch screen panel PC
Beckhoff CP6202-0001-0060 touch screen panel PC -
 Beckhoff CP3916-1002-0000 Multi-Touch Control Panel
Beckhoff CP3916-1002-0000 Multi-Touch Control Panel -
 Beckhoff EP1809-0021 | EtherCAT Box, 16-channel digital input, 24 V DC, 3 ms, M8Preferred type
Beckhoff EP1809-0021 | EtherCAT Box, 16-channel digital input, 24 V DC, 3 ms, M8Preferred type -
 Beckhoff CX8190 PLC Embedded Industrial PC Ethernet Controller
Beckhoff CX8190 PLC Embedded Industrial PC Ethernet Controller -
 Beckhoff CX2100-0914 Power Supply for External
Beckhoff CX2100-0914 Power Supply for External -
 Beckhoff Automation CP6906-0001-0000 HMI
Beckhoff Automation CP6906-0001-0000 HMI -
 Beckhoff EP7342-0002 Module
Beckhoff EP7342-0002 Module -
 Beckhoff CX1020-0112 / CX1100-0910 / CX1020-N010 / CX1100-0003 Windows CPU
Beckhoff CX1020-0112 / CX1100-0910 / CX1020-N010 / CX1100-0003 Windows CPU -
 Beckhoff EP7211-0034 EtherCAT Box 1 Channel Motion Interface
Beckhoff EP7211-0034 EtherCAT Box 1 Channel Motion Interface -
 Beckhoff C6240-0030 Control cabinet Industrial PC
Beckhoff C6240-0030 Control cabinet Industrial PC -
 beckhoff motherboard CB1052-0004 CB1052-0004
beckhoff motherboard CB1052-0004 CB1052-0004 -
 Beckhoff AX2006-AS Servo Drive / Variable Frequency Drive
Beckhoff AX2006-AS Servo Drive / Variable Frequency Drive -
BECKHOFF CP6207-0001-0020 NSMP
-
 Beckhoff C6930-1142-0060 Industrial Computer
Beckhoff C6930-1142-0060 Industrial Computer -
 Beckhoff FC7501-0000 interface card
Beckhoff FC7501-0000 interface card -
 Beckhoff CX5140-0175 Embedded PC PLC CPU CX5140 Industrial Controller
Beckhoff CX5140-0175 Embedded PC PLC CPU CX5140 Industrial Controller -
 Beckhoff CP7802-1100-0010: High-End IP65 Control Panel with DVI/USB Extended Interface
Beckhoff CP7802-1100-0010: High-End IP65 Control Panel with DVI/USB Extended Interface -
BECKHOFF CP3716-1058-0010 CONTROL PANEL
-
 Beckhoff AX8108-0000 Single-Axis Module
Beckhoff AX8108-0000 Single-Axis Module -
 Beckhoff CU8851-0000 | USB extension, USB Extended 2.0 receiver box
Beckhoff CU8851-0000 | USB extension, USB Extended 2.0 receiver box -
Beckhoff C6017-0030 | Ultra-compact Industrial PC
-
 Beckhoff CX1001-0120/CX10010120.cx1000-n001.cx1000-n000 System Overview
Beckhoff CX1001-0120/CX10010120.cx1000-n001.cx1000-n000 System Overview -
 Beckhoff CPU Module CX5140-0155/4GB CPU Module
Beckhoff CPU Module CX5140-0155/4GB CPU Module


