
ABBRER 133 Bus Connection Module
About this manual
Copyrights
The information in this document is subject to change without notice and should not be construed as a
commitment by ABB Oy. ABB Oy assumes no responsibility for any errors that may appear in this document.
In no event shall ABB Oy be liable for direct, indirect, special, incidental or consequential damages of any nature
or kind arising from the use of this document, nor shall ABB Oy be liable for incidental or consequential damages.
arising from use of any software or hardware described in this document. This document and parts thereof must not b
e reproduced or copied without written permission from ABB Oy, and the contents thereof must not be imparted to a th
ird party nor used for any unauthorized purpose. The software or hardware described in this document is furnished under a
license and may be used, copied, or disclosed only in accordance with the terms of such license. Copyright © 2005 ABB Oy Al
l rights reserved.
Trademarks
ABB is a registered trademark of ABB Group. All other brand or product names mentioned in this document may be trademarks or registered trademarks of their respective holders.
Guarantee
Please inquire about the terms of guarantee from your nearest ABB representative
Use of symbols
This document includes caution and information icons that point out safety-related conditions or other important information. The corresponding icons should be interpreted as follows: Although caution hazards are associated with equipment or property damage, it should be understood that operation of damaged equipment could, under certain operational conditions, result in degraded process performance leading to personal injury or death. Therefore, comply fully with all caution notices. The caution icon indicates important information or warning related to the concept discussed in the text. It might indicate the presence of a hazard which could result in corruption of software or damage to equipment or property. The information icon alerts the reader to relevant facts and
General
The RER 133 Bus Connection Module acts as an interfacing unit between an RE_54_ host device and a SPA, Modbus or DNP 3.0 system. The RER 133 module converts RS-232 signals to RS-485 signals. RS-485 can be connected by using 2- or 4-wire mode. The RER 133 module is connected by a cable to the RS-232 D-type connector marked X3.2 on the rear panel of the RE_ 54_ host device. RER 133 is not a stand alone device. An RE_ 54_ host device is always required to power the module. No external power supply is supported. RER 133 supports communication speeds from 300 to 19200 bits/s. Collision detection and collision avoidance is supported for communication speeds 4800, 9600 and 19200 bits/s. A RER 133 delivery includes the RER 133 Bus Connection Module, a connection cable (1MRS120542) and this manual.
Principle of operation
The RER 133 Bus Connection Module is designed to work with RE_ 54_ products. The module utilizes the RS-232 communication port located on the rear panel of the RE_ 54_. The module is not designed to be connected to any other ABB product, nor to any third party products. The signal levels and the functionality of the RER 133 module are defined in the RS-485 standard. RER 133 module is a regular type of RS-485 interface, meaning that a maximum of 32 nodes can be connected in a daisy chain type of bus configuration. Collision detection on the RS-485 bus is supported when a maximum of 32 nodes are connected to the same daisy chain. In order for collision detection to operate, the communication speed has to be set to 4800, 9600 or 19200 bits/s. These speeds are set by using the DIP switches on the front of the module. For an example on how to set these DIP switches, please see section ìModule configurationî on page 9. When collision detection is not used, the communication speed does not have to be set. A050315 Fig. 4.-1 Daisy chain REF 542 and REF 542plus are not supported by RER 133.
Construction and installation
The RER 133 module is mounted on the side of the RE_ 54_ host device and is connected by the supplied cable to the 9-pin female type D-connector (X3.2) of the RE_ 54_ host device.
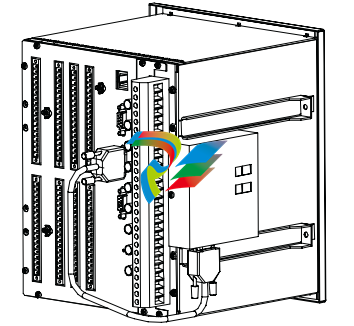
Only the cable supplied with the RER 133 may be used to connect the RER 133 module to the RE_ 54_.
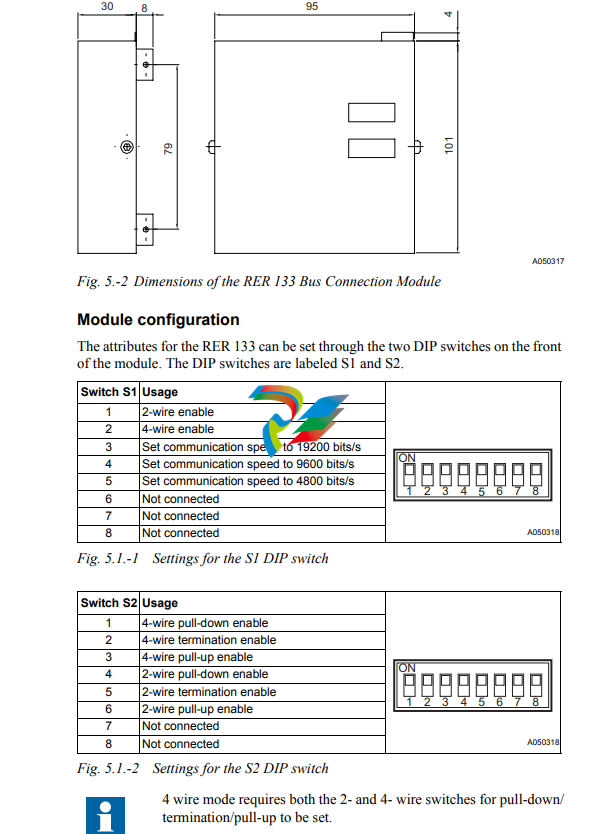
Interfaces
The RS-485 bus used by SPA, Modbus and DNP 3.0 requires a daisy chain topology. A daisy chain topology means a node-to-node connection, where nodes are chained using cables of minimal length. The cables must be point to point, no stars, rings or other topologies are allowed. The bus must be terminated at both ends using 120Ω resistors. The RER 133 includes as an option the use of internal termination resistors. These resistors are enabled through DIP switch S2. Pull-up and pull-down resistors must be used in one of the nodes, in order for the receivers to be able to determine the state of the bus when it is idle. These resistors can be enabled through DIP switch S2. Please see sections ìModule configurationî on page 9 and ìConfiguration examplesî on page 10 for the correct settings. The RS-232 interface (X1) of the RER 133 module is shown in Fig. 6.-1.
-
 Rolls-Royce PCC1030C Panel Controller Card
Rolls-Royce PCC1030C Panel Controller Card -
 Rolls-Royce RRDIO15 Remote Digital Input/Output Module
Rolls-Royce RRDIO15 Remote Digital Input/Output Module -
 Rolls-Royce TDI-11 Pitch & Direction Indicator Module
Rolls-Royce TDI-11 Pitch & Direction Indicator Module -
 Rolls-Royce CCN 01 CANman Controller Network Module
Rolls-Royce CCN 01 CANman Controller Network Module -
 Rolls-Royce SLIO 01 CANman Controller Network Module
Rolls-Royce SLIO 01 CANman Controller Network Module -
 Rolls-Royce MPC-210 Winch & Propulsion Control Module
Rolls-Royce MPC-210 Winch & Propulsion Control Module -
 Rolls-Royce MTI-144 Engine Control Module
Rolls-Royce MTI-144 Engine Control Module -
 Rolls-Royce Tenfjord FB10-002 Steering Gear Module (E-4500-40-1)
Rolls-Royce Tenfjord FB10-002 Steering Gear Module (E-4500-40-1) -
 ROLLS ROYCE MARINE AS CIRCUIT BOARD (PCB) RRAI016
ROLLS ROYCE MARINE AS CIRCUIT BOARD (PCB) RRAI016 -
 Rolls-Royce Marine AS PIP6-1 Marine Controller
Rolls-Royce Marine AS PIP6-1 Marine Controller -
 ROLLS-ROYCE MPC-300 STARTER CONTROL UNIT A7029099
ROLLS-ROYCE MPC-300 STARTER CONTROL UNIT A7029099 -
 Rolls-Royce Data Respons MPCF1-10.4" Maritime Panel Computer
Rolls-Royce Data Respons MPCF1-10.4" Maritime Panel Computer -
 ROLLS-ROYCE MARINE OLC-40009 PCB CARD
ROLLS-ROYCE MARINE OLC-40009 PCB CARD -
Rolls-Royce Marine Brattvaag WRC1021B Controller Board
-
 ROLLS-ROYCE CCN 01 & ROLLS-ROYCE SLIO 02 CANMAN CONTROLLER NETWORK
ROLLS-ROYCE CCN 01 & ROLLS-ROYCE SLIO 02 CANMAN CONTROLLER NETWORK -
.png) ROLLS-ROYCE ATC-3-A7033172 AQUAMASTER TURNING CONTROLLER
ROLLS-ROYCE ATC-3-A7033172 AQUAMASTER TURNING CONTROLLER -
 ROLLS-ROYCE POSCON V.3 JOYSTICK MODULE 6459
ROLLS-ROYCE POSCON V.3 JOYSTICK MODULE 6459 -
.png) Rolls-Royce Marine 389-496-00 Joystick Remote Control Panel 6799-W, 389-996-00
Rolls-Royce Marine 389-496-00 Joystick Remote Control Panel 6799-W, 389-996-00 -
 Rolls-Royce data respons 10.4'' Panel Computer 98H010A0000I/R10I53S
Rolls-Royce data respons 10.4'' Panel Computer 98H010A0000I/R10I53S -
 Rolls-Royce H1127.0101 Marine Controller 000068308
Rolls-Royce H1127.0101 Marine Controller 000068308 -
 Rolls-Royce CU40-0106-50 Steering Gear Control Panel
Rolls-Royce CU40-0106-50 Steering Gear Control Panel -
 Beckhoff Polaris CP7011-1002-0010 operator operator HMI display 30.5 cm
Beckhoff Polaris CP7011-1002-0010 operator operator HMI display 30.5 cm -
 Beckhoff AM8052-0JH1-0000 Servomotor 10.7 Nm (M0), F5 (104 mm)
Beckhoff AM8052-0JH1-0000 Servomotor 10.7 Nm (M0), F5 (104 mm) -
 Beckhoff BX5100-0000 CANopen Bus Terminal Controller
Beckhoff BX5100-0000 CANopen Bus Terminal Controller -
 Beckhoff CX9020-0115 PLC Module CX90200115
Beckhoff CX9020-0115 PLC Module CX90200115 -
 Beckhoff module EJ7211-0010 EtherCAT plug-in module
Beckhoff module EJ7211-0010 EtherCAT plug-in module -
 BECKHOFF AX5203-0000 Servo Driver
BECKHOFF AX5203-0000 Servo Driver -
 BECKHOFF CP6201-0001-0020 24VDC UNMP
BECKHOFF CP6201-0001-0020 24VDC UNMP -
 Beckhoff CX5120-0135 Embedded PC CPU Module
Beckhoff CX5120-0135 Embedded PC CPU Module -
 BECKHOFF C5240-0020/000224115 Plc Module
BECKHOFF C5240-0020/000224115 Plc Module -
 Beckhoff CP2918-0000 nelCP29xx-0000Pa | Multi-touch built-in Control Panel with DVI/USB Extended interface
Beckhoff CP2918-0000 nelCP29xx-0000Pa | Multi-touch built-in Control Panel with DVI/USB Extended interface -
 Beckhoff CX2020-0122 Embedded PC Controller
Beckhoff CX2020-0122 Embedded PC Controller -
 Beckhoff C6640-0040 Control Cabinet Industrial PC 7-Slot
Beckhoff C6640-0040 Control Cabinet Industrial PC 7-Slot -
 BECKHOFF CONTROL CABINET INDUSTRIAL PC - C6930-1062-0050
BECKHOFF CONTROL CABINET INDUSTRIAL PC - C6930-1062-0050 -
 Beckhoff Automation EtherCAT Terminal EK1100 EK1122
Beckhoff Automation EtherCAT Terminal EK1100 EK1122 -
Beckhoff CP6533-0001-0060 IPC
-
 Beckhoff EK9500 | EtherNet/IP™ Bus Coupler
Beckhoff EK9500 | EtherNet/IP™ Bus Coupler -
 Beckhoff CP6202-1047-0050 - An industrial-grade embedded panel computer.
Beckhoff CP6202-1047-0050 - An industrial-grade embedded panel computer. -
 Beckhoff C6650-0040 Industrial PC
Beckhoff C6650-0040 Industrial PC -
 BECKHOFF CX5230-0185 / 000119805 PLC Module
BECKHOFF CX5230-0185 / 000119805 PLC Module -
 BECKHOFF EL4732 | EtherCAT Terminal, 2-channel analog output, voltage, ±10 V, 16 bit, oversampling
BECKHOFF EL4732 | EtherCAT Terminal, 2-channel analog output, voltage, ±10 V, 16 bit, oversampling -
 Beckhoff CP6202-0001-0010 Economy Built-In Panel
Beckhoff CP6202-0001-0010 Economy Built-In Panel -
 Beckhoff AX5206-0000-0202 Digital Compact Servo Drives 2-channel
Beckhoff AX5206-0000-0202 Digital Compact Servo Drives 2-channel -
 Beckhoff CP6606-0001-0020 7-inch Economy Panel PC
Beckhoff CP6606-0001-0020 7-inch Economy Panel PC -
 Beckhoff CPU basic module CX2020-0155 + power supply module CX2100-0004
Beckhoff CPU basic module CX2020-0155 + power supply module CX2100-0004 -
 Beckhoff CP2913-000 Multi-Touch Display
Beckhoff CP2913-000 Multi-Touch Display -
 Beckhoff CP6500-1012-0060 14250369 Control Cabinet
Beckhoff CP6500-1012-0060 14250369 Control Cabinet -
 Beckhoff CP7902-0001-0000 Economy Control Panel with DVI/USB Extended interface
Beckhoff CP7902-0001-0000 Economy Control Panel with DVI/USB Extended interface -
 Beckhoff C6920-0010 Control cabinet Industrial PC
Beckhoff C6920-0010 Control cabinet Industrial PC -
 BECKHOFF C3640-0050 Build-in Industrial PCs
BECKHOFF C3640-0050 Build-in Industrial PCs -
 Beckhoff KL6023-0000 KL6023 EnOcean Wireless-Adapter
Beckhoff KL6023-0000 KL6023 EnOcean Wireless-Adapter -
 Kollmorgen AKM54G-ANC2DB00 servo motor
Kollmorgen AKM54G-ANC2DB00 servo motor -
 Kollmorgen AKD-P00606-NBCN-0000 Servo Drive
Kollmorgen AKD-P00606-NBCN-0000 Servo Drive -
Kollmorgen S200 Series S20350-VTS SERVO DRIVE
-
 KOLLMORGEN AKD-P00606-NBCC-I000 SERVO DRIVE
KOLLMORGEN AKD-P00606-NBCC-I000 SERVO DRIVE -
 Kollmorgen MV65WKS-CE310/22PB Servo Drive Control Module
Kollmorgen MV65WKS-CE310/22PB Servo Drive Control Module -
 Kollmorgen S20360-VTS-021 Servo Drive
Kollmorgen S20360-VTS-021 Servo Drive -
 KOLLMORGEN CR06550 High-precision digital servo amplifier
KOLLMORGEN CR06550 High-precision digital servo amplifier -
 KOLLMORGEN DBL5N01050-03S-VV0-S40 3-Phase AC Synchronous Brushless Servo Motor
KOLLMORGEN DBL5N01050-03S-VV0-S40 3-Phase AC Synchronous Brushless Servo Motor -
 KOLLMORGEN S70301-NANANA-024 SERVO DRIVE
KOLLMORGEN S70301-NANANA-024 SERVO DRIVE -
 Kollmorgen S20360-VTS S200 Series Servo Drive
Kollmorgen S20360-VTS S200 Series Servo Drive -
 Kollmorgen RBE-03011-A00 Brushless Frameless Servo Motor
Kollmorgen RBE-03011-A00 Brushless Frameless Servo Motor -
 KOLLMORGEN AKD-T00306-NBAN-0000 INPUT SERVO DRIVE
KOLLMORGEN AKD-T00306-NBAN-0000 INPUT SERVO DRIVE -
 KOLLMORGEN S700 Servo Controller S70302-NANANA
KOLLMORGEN S700 Servo Controller S70302-NANANA -
 Kollmorgen AKD-P00607-NBEC-0000 400/480VAC 4.40KVA Servo Drive.
Kollmorgen AKD-P00607-NBEC-0000 400/480VAC 4.40KVA Servo Drive. -
 KOLLMORGEN S70102-NANANA SERVO DRIVE
KOLLMORGEN S70102-NANANA SERVO DRIVE -
 KOLLMORGEN AKM21E-ANSNEH02 PM Servo Motor & PRD-AMPE25EB-00 Servo Drive Array
KOLLMORGEN AKM21E-ANSNEH02 PM Servo Motor & PRD-AMPE25EB-00 Servo Drive Array -
 KollMorgen SC1R06260 Servo Drive 1.4/2.2 KVA 115230 Vac
KollMorgen SC1R06260 Servo Drive 1.4/2.2 KVA 115230 Vac -
 Kollmorgen AKD-P00306-NBAN-0000 Servo Drive
Kollmorgen AKD-P00306-NBAN-0000 Servo Drive -
Kollmorgen TTB2-2042-3052-A DC Motor Industrial Drive 5.5A 185 oz/in
-
 KOLLMORGEN SERVOSTAR 610-AS SERVO AMPLIFIER_SERVOSTAR610AS_S61001
KOLLMORGEN SERVOSTAR 610-AS SERVO AMPLIFIER_SERVOSTAR610AS_S61001 -
 KOLLMORGEN PRD-0016400P-10 & PRD-0016600D-30 Axis Control System Modules
KOLLMORGEN PRD-0016400P-10 & PRD-0016600D-30 Axis Control System Modules -
KOLLMORGEN Seidel DBL5N01700-03S-000-S40 Servo Motor
-
 Hirschmann RS20-1600M2T1SDAEHH03.1.02 Rail Switch
Hirschmann RS20-1600M2T1SDAEHH03.1.02 Rail Switch -
 Hirschmann BRS30-24TX Industrial Rail Switch
Hirschmann BRS30-24TX Industrial Rail Switch -
 Hirschmann RSPM20-4T14T1EV9HHS999.9.99 Managed Ethernet Switch
Hirschmann RSPM20-4T14T1EV9HHS999.9.99 Managed Ethernet Switch -
 Hirschmann BELDEN RS40-0009CCCCSDAPHH09.0.14 / RS400009CCCCSDAPHH09014
Hirschmann BELDEN RS40-0009CCCCSDAPHH09.0.14 / RS400009CCCCSDAPHH09014 -
Hirschmann RS40 Rail Switch RS40-0009CCCCSDAE
-
 Hirschmann BELDEN RS30-0802T1T1SDAP / RS300802T1T1SDAP Fully Managed Layer 2 Compact Rail Switch
Hirschmann BELDEN RS30-0802T1T1SDAP / RS300802T1T1SDAP Fully Managed Layer 2 Compact Rail Switch -
 Hirschmann BELDEN RS20-0800M2M2SDAUHH / RS200800M2M2SDAUHH
Hirschmann BELDEN RS20-0800M2M2SDAUHH / RS200800M2M2SDAUHH -
 Hirschmann EAGLE30-04022O6TT999SCCY9HSE3F Industrial Firewall Router Switch
Hirschmann EAGLE30-04022O6TT999SCCY9HSE3F Industrial Firewall Router Switch -
 Hirschmann RS20-1600T1T1SDAEHH09.0.14 RS20 Rail Mount Ethernet Switch
Hirschmann RS20-1600T1T1SDAEHH09.0.14 RS20 Rail Mount Ethernet Switch -
 Hirschmann EAGLE0200T1T1TDDY90000HHE05.3.03 Industrial Security Router
Hirschmann EAGLE0200T1T1TDDY90000HHE05.3.03 Industrial Security Router -
Hirschmann - BELDEN MIPP-AD-1L9P
-
 HIRSCHMANN RSPM20-4Z64Z6TV9HHS9 942 106-999 RAIL SAFETY SWITCH
HIRSCHMANN RSPM20-4Z64Z6TV9HHS9 942 106-999 RAIL SAFETY SWITCH -
 HIRSCHMANN FIBEROPTIC MODULE FIP P/N: OZDFIPG3T
HIRSCHMANN FIBEROPTIC MODULE FIP P/N: OZDFIPG3T -
 HIRSCHMANN RS20-1600M2M2SDAUHH Ethernet rack-mounted switch
HIRSCHMANN RS20-1600M2M2SDAUHH Ethernet rack-mounted switch -
 HIRSCHMANN BELDEN RS20-0400T1T1SDAEHH04.0.01 / RS200400T1T1SDAEHH04001
HIRSCHMANN BELDEN RS20-0400T1T1SDAEHH04.0.01 / RS200400T1T1SDAEHH04001 -
HIRSCHMANN MM2-4FXM3 MICE Media Module
-
HIRSCHMANN RS20-0800M2M2SDAE Industrial Ethernet Rail Switch
-
 Hirschmann RS20-2400T1T1SDAP / RS20-2400T1T1SDAPHH05.0.02
Hirschmann RS20-2400T1T1SDAP / RS20-2400T1T1SDAPHH05.0.02 -
 GE MLJ1005B010H00C MLJ Digital Synchromism Check
GE MLJ1005B010H00C MLJ Digital Synchromism Check -
 ALSTOM MICROTECH DX21-M2 Digital Excitation Controller
ALSTOM MICROTECH DX21-M2 Digital Excitation Controller -
HIRSCHMANN BRS20-1200ZZZZ-STCY99HHSES
-
 HIRSCHMANN MM3-4FXM2 MICE Media Module
HIRSCHMANN MM3-4FXM2 MICE Media Module -
Hirschmann RSB20-0800T1T1SAABHH 8Port ENet Rail Switch RSB20
-
 Hirschmann MACH102-8TP Ethernet Switch
Hirschmann MACH102-8TP Ethernet Switch -
 SAACKE DDZ-M marine steam pressure atomizer
SAACKE DDZ-M marine steam pressure atomizer -
 SAACKE SKV-A marine rotary cup atomizer
SAACKE SKV-A marine rotary cup atomizer -
 SAACKE Seavis HMI05e
SAACKE Seavis HMI05e -
 Kollmorgen MMC-SD-2.0-230 Servo Drive 100-240VAC 2KW 10A Output 3PH 100-240VAC
Kollmorgen MMC-SD-2.0-230 Servo Drive 100-240VAC 2KW 10A Output 3PH 100-240VAC -
 Kollmorgen Servo drive CR10550
Kollmorgen Servo drive CR10550 -
 Kollmorgen AKD-P01207-NACN-0054 Servo Driver
Kollmorgen AKD-P01207-NACN-0054 Servo Driver -
 Kollmorgen S406M-CA-036 Servostar
Kollmorgen S406M-CA-036 Servostar -
.png) Kollmorgen AKD-B02407-NAAN-0000 Digital Servo Drive
Kollmorgen AKD-B02407-NAAN-0000 Digital Servo Drive -
 Kollmorgen SERVOSTAR S406AM-CA Digital Servo Drive
Kollmorgen SERVOSTAR S406AM-CA Digital Servo Drive -
 KOLLMORGEN SERVOSTAR 603-AS SERVO AMPLIFIER_SERVOSTAR603AS_S60301
KOLLMORGEN SERVOSTAR 603-AS SERVO AMPLIFIER_SERVOSTAR603AS_S60301 -
Kollmorgen S700 Servo Controller (S70602-NANANA-NA)
-
 Kollmorgen MPK411 controller
Kollmorgen MPK411 controller -
 KOLLMORGEN MMC-SD-1.3-460-D Smart Drive
KOLLMORGEN MMC-SD-1.3-460-D Smart Drive -
 KOLLMORGEN AKM21C-CKB2AA-00 / AKM21CCKB2AA00 Servomotor
KOLLMORGEN AKM21C-CKB2AA-00 / AKM21CCKB2AA00 Servomotor -
 BECKHOFF AX5106-0000-0200 | Digital Compact Servo Drives 1-channel
BECKHOFF AX5106-0000-0200 | Digital Compact Servo Drives 1-channel -
 BECKHOFF C3620-0000 INDUSTRIAL COMPUTER (MOTORSHELVES)
BECKHOFF C3620-0000 INDUSTRIAL COMPUTER (MOTORSHELVES) -
 Beckhoff EK1960-0000 TwinSAFE Compact Controller
Beckhoff EK1960-0000 TwinSAFE Compact Controller -
 Beckhoff C6930-0050 Control Cabinet Industrial PC
Beckhoff C6930-0050 Control Cabinet Industrial PC -
 Beckhoff CP7711-0001-0030 Industrial Computer Detection
Beckhoff CP7711-0001-0030 Industrial Computer Detection -
 Beckhoff CX1001-0111 Embedded PC CPU Module
Beckhoff CX1001-0111 Embedded PC CPU Module -
 Beckhoff C6017-0020 | Ultra-compact Industrial PC
Beckhoff C6017-0020 | Ultra-compact Industrial PC -
 Beckhoff EK1322 | 2-port EtherCAT P junction with feed-in
Beckhoff EK1322 | 2-port EtherCAT P junction with feed-in -
 Beckhoff CP2219-0010 Panel
Beckhoff CP2219-0010 Panel -
 BECKHOFF C6015-0020 ULTRA COMPACT INDUSTRIAL PC
BECKHOFF C6015-0020 ULTRA COMPACT INDUSTRIAL PC -
 BECKHOFF CX2030-0120/Standard CPU Module Embedded PC Windows PLC controller
BECKHOFF CX2030-0120/Standard CPU Module Embedded PC Windows PLC controller -
 Beckhoff CP7721-1090-0020 Panel PC
Beckhoff CP7721-1090-0020 Panel PC -
 Beckhoff PC CPU Module CX5130-0175
Beckhoff PC CPU Module CX5130-0175 -
 Beckhoff C6920-0050 Control Cabinet
Beckhoff C6920-0050 Control Cabinet -
 Beckhoff EL6631 EtherCAT 2-Port Communication Interface, Profinet RT Controller
Beckhoff EL6631 EtherCAT 2-Port Communication Interface, Profinet RT Controller -
 Beckhoff CP6202-0001-0060 touch screen panel PC
Beckhoff CP6202-0001-0060 touch screen panel PC -
 Beckhoff CP3916-1002-0000 Multi-Touch Control Panel
Beckhoff CP3916-1002-0000 Multi-Touch Control Panel


